






Р’ СҖСғРұСҖРёРәСғ "РҡРҫРјРҝР»РөРәСҒРҪСӢРө СҖРөСҲРөРҪРёСҸ. РҳРҪСӮРөРіСҖРёСҖРҫРІР°РҪРҪСӢРө СҒРёСҒСӮРөРјСӢ" | Рҡ СҒРҝРёСҒРәСғ СҖСғРұСҖРёРә | Рҡ СҒРҝРёСҒРәСғ авСӮРҫСҖРҫРІ | Рҡ СҒРҝРёСҒРәСғ РҝСғРұлиРәР°СҶРёР№
 Рҗ.Р’. РӣРөСғСҒ
Рҗ.Р’. РӣРөСғСҒ
 Р“.РӨ. РЁР°РҪР°РөРІ
Р“.РӨ. РЁР°РҪР°РөРІ
РЎРҫРІСҖРөРјРөРҪРҪР°СҸ СҒРёСҒСӮРөРјР° Р·Р°СүРёСӮСӢ РҝРөСҖРёРјРөСӮСҖР° С…Р°СҖР°РәСӮРөСҖРёР·СғРөСӮСҒСҸ РҪРө СӮРҫР»СҢРәРҫ СҒРҫРІРҫРәСғРҝРҪРҫСҒСӮСҢСҺ взаимРҫРҙРөР№СҒСӮРІСғСҺСүРёС… РјРөР¶РҙСғ СҒРҫРұРҫР№ СҒР»РҫР¶РҪРөР№СҲРёС… СӮРөС…РҪРёСҮРөСҒРәРёС… СғСҒСӮСҖРҫР№СҒСӮРІ, РҪРҫ Рё РёС… взаимРҪСӢРј СҖР°СҒРҝРҫР»РҫР¶РөРҪРёРөРј РҪР° РјРөСҒСӮРҪРҫСҒСӮРё, РҫРҝСҖРөРҙРөР»СҸСҺСүРёРј РәРҫРҪфигСғСҖР°СҶРёСҺ РІРҪРөСҲРҪРёС… СҖСғРұРөР¶РөР№ РҫС…СҖР°РҪСӢ. РҹРҫСҒР»РөРҙРҪРёРө РҫРұСӢСҮРҪРҫ РІРәР»СҺСҮР°СҺСӮ РІ СҒРөРұСҸ:
РҹРөСҖРөСҮРёСҒР»РөРҪРҪСӢРө РәРҫРјРҝРҫРҪРөРҪСӮСӢ РёРҪСӮРөРіСҖРёСҖРҫРІР°РҪСӢ РІ РөРҙРёРҪСӢР№ РәРҫРјРҝР»РөРәСҒ РёРҪР¶РөРҪРөСҖРҪРҫ-СӮРөС…РҪРёСҮРөСҒРәРёС… СҒСҖРөРҙСҒСӮРІ физиСҮРөСҒРәРҫР№ Р·Р°СүРёСӮСӢ. РһСӮ РҫСҖРіР°РҪРёР·Р°СҶРёРё РёС… взаимРҫРҙРөР№СҒСӮРІРёСҸ РІ РҝСҖРҫСҶРөСҒСҒРө СҒРҫРІРјРөСҒСӮРҪРҫРіРҫ С„СғРҪРәСҶРёРҫРҪРёСҖРҫРІР°РҪРёСҸ РІРҫ РјРҪРҫРіРҫРј завиСҒРёСӮ СҚффРөРәСӮРёРІРҪРҫСҒСӮСҢ РІСҒРөР№ физиСҮРөСҒРәРҫР№ Р·Р°СүРёСӮСӢ РҫС…СҖР°РҪСҸРөРјРҫРіРҫ РҫРұСҠРөРәСӮР°.
РһСҒСӮР°РҪРҫРІРёРјСҒСҸ РҝРҫРҙСҖРҫРұРҪРөРө РҪР° РҝРҫРҙС…РҫРҙРө Рә РІСӢРұРҫСҖСғ СҒСӮСҖСғРәСӮСғСҖСӢ РІРҪРөСҲРҪРөРіРҫ СҖСғРұРөжа РҫС…СҖР°РҪСӢ (Р Рһ) Рё РҫСҖРіР°РҪРёР·Р°СҶРёРё взаимРҫРҙРөР№СҒСӮРІРёСҸ РІ РөРіРҫ СҒРҫСҒСӮавРө СҒСҖРөРҙСҒСӮРІ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ Рё СҒРёСҒСӮРөРјСӢ СӮРөР»РөРІРёР·РёРҫРҪРҪРҫРіРҫ РҪР°РұР»СҺРҙРөРҪРёСҸ.
РҹСҖРёСҮРёРҪРҫР№ РҪР°РҝРёСҒР°РҪРёСҸ РҙР°РҪРҪРҫР№ СҒСӮР°СӮСҢРё СҸвилаСҒСҢ РҫРұРҫР·РҪР°СҮРёРІСҲР°СҸСҒСҸ РІ РҝРҫСҒР»РөРҙРҪРөРө РІСҖРөРјСҸ СӮРөРҪРҙРөРҪСҶРёСҸ СӮР°РәРҫР№ РҫСҖРіР°РҪРёР·Р°СҶРёРё РҝРөСҖРёРјРөСӮСҖРҫРІСӢС… СҖСғРұРөР¶РөР№ РҫС…СҖР°РҪСӢ, РҝСҖРё РәРҫСӮРҫСҖРҫР№ РҪР° РіСҖР°РҪРёСҶРө РҫС…СҖР°РҪСҸРөРјРҫР№ СӮРөСҖСҖРёСӮРҫСҖРёРё СғСҒСӮР°РҪавливаРөСӮСҒСҸ РҫСҒРҪРҫРІРҪРҫРө загСҖажРҙРөРҪРёРө (СҮР°СүРө РІСҒРөРіРҫ РҪРө РҫРұРҫСҖСғРҙРҫРІР°РҪРҪРҫРө СҒСҖРөРҙСҒСӮвами РҫС…СҖР°РҪРҪРҫР№ СҒРёРіРҪализаСҶРёРё), Р° РҪР° РҪРөРәРҫСӮРҫСҖРҫРј СғРҙалРөРҪРёРё РҫСӮ РҪРөРіРҫ вҖ“ СҖСғРұРөР¶ РҫС…СҖР°РҪРҪРҫР№ СҒРёРіРҪализаСҶРёРё (Р РһРЎ) (РәР°Рә РҝСҖавилРҫ, РұРөР· физиСҮРөСҒРәРёС… РұР°СҖСҢРөСҖРҫРІ). РўРөР»РөРІРёР·РёРҫРҪРҪСӢРө РәамРөСҖСӢ (РўР’Рҡ) СҖазмРөСүР°СҺСӮСҒСҸ СӮР°РәРёРј РҫРұСҖазРҫРј, СҮСӮРҫ РёС… РҝРҫР»СҸ Р·СҖРөРҪРёСҸ РҫС…РІР°СӮСӢРІР°СҺСӮ РІРҪРөСҲРҪСҺСҺ, РҝСҖРёР»РөРіР°СҺСүСғСҺ Рә РҫС…СҖР°РҪСҸРөРјРҫРјСғ РҫРұСҠРөРәСӮСғ СӮРөСҖСҖРёСӮРҫСҖРёСҺ Рё СҮР°СҒСӮСҢ РҫСҒРҪРҫРІРҪРҫРіРҫ загСҖажРҙРөРҪРёСҸ. РҹСҖРёРјРөСҖРҫРј РјРҫР¶РөСӮ СҒР»СғжиСӮСҢ СҖазСҖРөР· РҝРөСҖРёРјРөСӮСҖР°, СҒС„РҫСҖРјРёСҖРҫРІР°РҪРҪРҫРіРҫ РҫРҙРҪРҫР№ РёР· РІРөРҙСғСүРёС… РәРҫРјРҝР°РҪРёР№, РҙавРҪРҫ СҖР°РұРҫСӮР°СҺСүРөР№ РҪР° СҖСӢРҪРәРө РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё (СҖРёСҒ. 1). Р’РҪРөСҲРҪРөРө РҫСҒРҪРҫРІРҪРҫРө загСҖажРҙРөРҪРёРө СҖР°СҒРҝРҫР»РҫР¶РөРҪРҫ РҪР° РіСҖР°РҪРёСҶРө РҫС…СҖР°РҪСҸРөРјРҫРіРҫ РҫРұСҠРөРәСӮР° Рё РІ СҖСҸРҙРө СҒР»СғСҮР°РөРІ РҪРө РҫРұРҫСҖСғРҙСғРөСӮСҒСҸ РҫС…СҖР°РҪРҪРҫР№ СҒРёРіРҪализаСҶРёРөР№.

Р’ СҮРөРј, РҪР° РҪР°СҲ РІР·РіР»СҸРҙ, СҒРҫСҒСӮРҫРёСӮ РҫСҒРҪРҫРІРҪРҫР№ РҪРөРҙРҫСҒСӮР°СӮРҫРә СӮР°РәРҫР№ СҒСӮСҖСғРәСӮСғСҖСӢ СҖСғРұРөжа РҫС…СҖР°РҪСӢ? РһСӮРІРөСӮ РҙРҫРІРҫР»СҢРҪРҫ РҝСҖРҫСҒСӮ: РҝРҫРҙРіРҫСӮРҫРІР»РөРҪРҪСӢР№ РҫРҙРёРҪРҫСҮРҪСӢР№ РҪР°СҖСғСҲРёСӮРөР»СҢ РҝСҖРөРҫРҙРҫР»РөРІР°РөСӮ РіРёРұРәРҫРө загСҖажРҙРөРҪРёРө СҒСҖРөРҙРҪРөР№ РІСӢСҒРҫСӮСӢ (РҙРҫ 2,5 Рј) РҝСғСӮРөРј РҝРөСҖРөлаза РҫРұСӢСҮРҪРҫ Р·Р° 12 СҒРөРәСғРҪРҙ Рё РұСӢСҒСӮСҖРөРө, Р¶РөСҒСӮРәРҫРө загСҖажРҙРөРҪРёРө РұРҫР»СҢСҲРҫР№ РІСӢСҒРҫСӮСӢ (РҙРҫ 3,5 Рј) вҖ“ РҫРұСӢСҮРҪРҫ Р·Р° 14 СҒРөРәСғРҪРҙ Рё РұСӢСҒСӮСҖРөРө. Р•СҒли СғСҮРөСҒСӮСҢ, СҮСӮРҫ РІРҪРөСҲРҪРөРө загСҖажРҙРөРҪРёРө РјРҫР¶РөСӮ РҝСҖРөРҫРҙРҫР»РөРІР°СӮСҢСҒСҸ РҪР°СҖСғСҲРёСӮРөР»РөРј СҒ РҝРҫРјРҫСүСҢСҺ РҝРҫСҒРҫРұРҪРёРәРҫРІ, РёСҒРҝРҫР»СҢР·СғСҺСүРёС… РІСҒРҝРҫРјРҫРіР°СӮРөР»СҢРҪСӢРө РҝСҖРёСҒРҝРҫСҒРҫРұР»РөРҪРёСҸ (РҫСӮ Р»РөСҒСӮРҪРёСҶСӢ РҙРҫ авСӮРҫРәСҖР°РҪР°), СӮРҫ РІСҖРөРјСҸ РҝСҖРөРҫРҙРҫР»РөРҪРёСҸ СҒРҫРәСҖР°СүР°РөСӮСҒСҸ РҙРҫ 5 СҒРөРәСғРҪРҙ, Р° РІРёРұСҖР°СҶРёРҫРҪРҪСӢРө СҒСҖРөРҙСҒСӮРІР° РҫРұРҪР°СҖСғР¶РөРҪРёСҸ, СҖазмРөСүРөРҪРҪСӢРө РҪР° загСҖажРҙРөРҪРёРё, РјРҫРіСғСӮ РІРҫРҫРұСүРө РҪРө зафиРәСҒРёСҖРҫРІР°СӮСҢ фаРәСӮ РҝСҖРҫРҪРёРәРҪРҫРІРөРҪРёСҸ. РҹРҫСҒР»Рө СҚСӮРҫРіРҫ РҪР°СҖСғСҲРёСӮРөР»СҢ РҫРәазСӢРІР°РөСӮСҒСҸ РІ Р·РҫРҪРө РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РҝРөСҖРІРҫРіРҫ Р РһРЎ (СҮР°СүРө РІСҒРөРіРҫ РҫСҖРіР°РҪРёР·РҫРІР°РҪРҪРҫРіРҫ РҪР° СҖР°РҙРёРҫР»СғСҮРөРІСӢС… РёР·РІРөСүР°СӮРөР»СҸС…) Рё РҝСҖРҫРҙРҫлжаРөСӮ СҒРІРҫРө РҙРІРёР¶РөРҪРёРө СҒРҫ СҒРәРҫСҖРҫСҒСӮСҢСҺ 3вҖ“5 Рј/СҒ. РҹРҫСҒРәРҫР»СҢРәСғ РҪР° РҝСғСӮРё РҙРІРёР¶РөРҪРёСҸ РұРҫР»СҢСҲРө РҪРөСӮ РҝСҖРөРҝСҸСӮСҒСӮРІРёР№ (СҒРј. СҖРёСҒ. 1), СӮРҫ РҪРө РұРҫР»РөРө СҮРөРј СҮРөСҖРөР· 3 СҒРөРәСғРҪРҙСӢ РҫРҪ РҝРөСҖРөСҒРөСҮРөСӮ СҖСғРұРөР¶ РҫС…СҖР°РҪСӢ (РІСӢзвав РҝРҫ РҝСғСӮРё СҒСҖР°РұР°СӮСӢРІР°РҪРёРө РөСүРө РҪРөСҒРәРҫР»СҢРәРёС… РёР·РІРөСүР°СӮРөР»РөР№) Рё Р·Р°СӮРөСҖСҸРөСӮСҒСҸ РҪР° СӮРөСҖСҖРёСӮРҫСҖРёРё РҫС…СҖР°РҪСҸРөРјРҫРіРҫ РҫРұСҠРөРәСӮР°. РҹРөСҖРІСӢР№ (РІ РҪР°СҲРөРј СҒР»СғСҮР°Рө вҖ“ СҖР°РҙРёРҫР»СғСҮРөРІРҫР№) РёР·-РІРөСүР°СӮРөР»СҢ СҒС„РҫСҖРјРёСҖСғРөСӮ СӮСҖРөРІРҫР¶РҪРҫРө РёР·РІРөСүРөРҪРёРө, РәРҫСӮРҫСҖРҫРө РјРҫР¶РөСӮ РұСӢСӮСҢ РІРҫСҒРҝСҖРёРҪСҸСӮРҫ СҒРёСҒСӮРөРјРҫР№ СҒРұРҫСҖР° Рё РҫРұСҖР°РұРҫСӮРәРё РёРҪС„РҫСҖРјР°СҶРёРё (РЎРЎРһРҳ) РҪРө СҖР°РҪРөРө СҮРөРј СҮРөСҖРөР· 2 СҒРөРәСғРҪРҙСӢ РҝРҫСҒР»Рө РІС…РҫРҙР° РҪР°СҖСғСҲРёСӮРөР»СҸ РІ РөРіРҫ Р·РҫРҪСғ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ. РЎСҖРөРҙРҪРөРө РІСҖРөРјСҸ СҖРөР°РәСҶРёРё СҒРёСҒСӮРөРјСӢ (РҫСӮ РҝРҫР»СғСҮРөРҪРёСҸ СӮСҖРөРІРҫР¶РҪРҫРіРҫ РёР·РІРөСүРөРҪРёСҸ РҙРҫ РІСӢРІРҫРҙР° СӮСҖРөРІРҫР¶РҪРҫРіРҫ РёР·РҫРұСҖажРөРҪРёСҸ РҪР° РјРҫРҪРёСӮРҫСҖ РҫРҝРөСҖР°СӮРҫСҖР°) РјРҫР¶РөСӮ СҒРҫСҒСӮавиСӮСҢ РұРҫР»РөРө 4 СҒРөРәСғРҪРҙ. Р—Р° СҚСӮРё 6 СҒРөРәСғРҪРҙ РҪР°СҖСғСҲРёСӮРөР»СҢ РІСӢР№РҙРөСӮ РҪРө СӮРҫР»СҢРәРҫ Р·Р° РҝСҖРөРҙРөР»СӢ РҝРҫР»СҸ Р·СҖРөРҪРёСҸ РўР’Рҡ, РҪРҫ Рё Р·Р° РҝСҖРөРҙРөР»СӢ СҒамРҫРіРҫ СҖСғРұРөжа РҫС…СҖР°РҪСӢ. РЎР»РөРҙРҫРІР°СӮРөР»СҢРҪРҫ, РІРөСҖифиРәР°СҶРёСҸ СӮСҖРөРІРҫРіРё РІ СҖРөалСҢРҪРҫРј РјР°СҒСҲСӮР°РұРө РІСҖРөРјРөРҪРё РІ СҚСӮРҫРј СҒР»СғСҮР°Рө СҒСӮР°РҪРҫРІРёСӮСҒСҸ РҪРөРІРҫР·РјРҫР¶РҪРҫР№, СҮСӮРҫ Р·РҪР°СҮРёСӮРөР»СҢРҪРҫ СҒРҪижаРөСӮ СҚффРөРәСӮРёРІРҪРҫСҒСӮСҢ С„СғРҪРәСҶРёРҫРҪРёСҖРҫРІР°РҪРёСҸ СҒРёСҒСӮРөРјСӢ Р·Р°СүРёСӮСӢ РҝРөСҖРёРјРөСӮСҖР°, СҒСӮСҖСғРәСӮСғСҖР° РәРҫСӮРҫСҖРҫР№ РҫСӮРҫРұСҖажРөРҪР° РҪР° СҖРёСҒ. 1.
ДлСҸ СғСҒСӮСҖР°РҪРөРҪРёСҸ СғРәазаРҪРҪРҫРіРҫ РҪРөРҙРҫСҒСӮР°СӮРәР° РҪРөРҫРұС…РҫРҙРёРјРҫ РёР·РјРөРҪРёСӮСҢ СҒСӮСҖСғРәСӮСғСҖСғ РІРҪРөСҲРҪРөРіРҫ СҖСғРұРөжа РҫС…СҖР°РҪСӢ СӮР°РәРёРј РҫРұСҖазРҫРј, СҮСӮРҫРұСӢ РҫРҪР° РҝРҫР·РІРҫлила РІСӢРҝРҫР»РҪРёСӮСҢ РөРіРҫ РҫСҒРҪРҫРІРҪСӢРө С„СғРҪРәСҶРёРё РІ СҒР»РөРҙСғСҺСүРөР№ РҝРҫСҒР»РөРҙРҫРІР°СӮРөР»СҢРҪРҫСҒСӮРё:
Р’СӢРҝРҫР»РҪРөРҪРёРө СҚСӮРёС… СӮСҖРөРұРҫРІР°РҪРёР№ РІРҫР·РјРҫР¶РҪРҫ РҝСҖРё С„РҫСҖРјРёСҖРҫРІР°РҪРёРё РІРҪРөСҲРҪРөРіРҫ СҖСғРұРөжа РҫС…СҖР°РҪСӢ РҝРҫ РҝСҖРөРҙлагаРөРјРҫР№ РҪами СҒС…РөРјРө (СҖРёСҒ. 2).
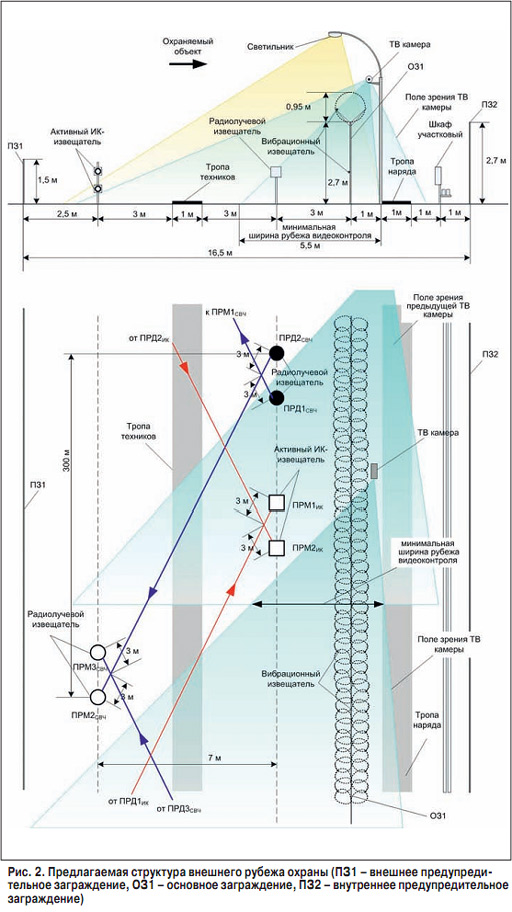
Р’РҪРөСҲРҪРөРө РҝСҖРөРҙСғРҝСҖРөРҙРёСӮРөР»СҢРҪРҫРө загСҖажРҙРөРҪРёРө (РҹР—1) СғСҒСӮР°РҪавливаРөСӮСҒСҸ РҪР° РіСҖР°РҪРёСҶРө РҫС…СҖР°РҪСҸРөРјРҫР№ СӮРөСҖСҖРёСӮРҫСҖРёРё Рё СҒР»СғжиСӮ РҙР»СҸ РҝСҖРөРҙРҫСӮРІСҖР°СүРөРҪРёСҸ РІС…РҫРҙР° РҝРҫСҒСӮРҫСҖРҫРҪРҪРёС… лиСҶ Рё живРҫСӮРҪСӢС… РІ Р·РҫРҪСғ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РҝРөСҖРІРҫРіРҫ СҖСғРұРөжа РҫС…СҖР°РҪРҪРҫР№ СҒРёРіРҪализаСҶРёРё СҒ СҶРөР»СҢСҺ РёСҒРәР»СҺСҮРөРҪРёСҸ Р»РҫР¶РҪСӢС… СҒСҖР°РұР°СӮСӢРІР°РҪРёР№ РёР·РІРөСүР°СӮРөР»РөР№.
РҹРөСҖРІСӢР№ СҖСғРұРөР¶ РҫС…СҖР°РҪРҪРҫР№ СҒРёРіРҪализаСҶРёРё РҫРұРөСҒРҝРөСҮРёРІР°РөСӮ РҫРұРҪР°СҖСғР¶РөРҪРёРө РҝСҖРҫРҪРёРәРҪРҫРІРөРҪРёСҸ РҪР°СҖСғСҲРёСӮРөР»СҸ РҪР° РҫС…СҖР°РҪСҸРөРјСғСҺ СӮРөСҖСҖРёСӮРҫСҖРёСҺ. РЎС„РҫСҖРјРёСҖРҫРІР°РҪРҪРҫРө СҒСҖРөРҙСҒСӮвами РҫРұРҪР°СҖСғР¶РөРҪРёСҸ (РЎРһ) СӮСҖРөРІРҫР¶РҪРҫРө РёР·РІРөСүРөРҪРёРө СҸРІР»СҸРөСӮСҒСҸ РҫСҒРҪРҫРІР°РҪРёРөРј РҙР»СҸ РІСӢРІРҫРҙР° РҪР° РјРҫРҪРёСӮРҫСҖ РҫРҝРөСҖР°СӮРҫСҖР° СӮРөР»РөРІРёР·РёРҫРҪРҪРҫРіРҫ РёР·РҫРұСҖажРөРҪРёСҸ СӮРҫРіРҫ СғСҮР°СҒСӮРәР° Р Рһ, РҪР° РәРҫСӮРҫСҖРҫРј РҝСҖРҫРёР·РҫСҲР»Рҫ РҝСҖРҫРҪРёРәРҪРҫРІРөРҪРёРө. РҳР·РІРөСүР°СӮРөли, РІС…РҫРҙСҸСүРёРө РІ СҒРҫСҒСӮав РҙР°РҪРҪРҫРіРҫ Р РһРЎ, СҒР»РөРҙСғРөСӮ СҖазмРөСүР°СӮСҢ РұРөР· загСҖажРҙРөРҪРёСҸ РҪР° РҫСӮРәСҖСӢСӮРҫРј, С…РҫСҖРҫСҲРҫ РҫСҒРІРөСүРөРҪРҪРҫРј Рё РҝСҖРҫСҒРјР°СӮСҖРёРІР°РөРјРҫРј СғСҮР°СҒСӮРәРө РјРөСҒСӮРҪРҫСҒСӮРё СҒ СҶРөР»СҢСҺ СҒРҫР·РҙР°РҪРёСҸ РұлагРҫРҝСҖРёСҸСӮРҪСӢС… СғСҒР»РҫРІРёР№ РҙР»СҸ С„СғРҪРәСҶРёРҫРҪРёСҖРҫРІР°РҪРёСҸ РЎРўРқ. Р РһРЎ РјРҫР¶РҪРҫ РҫСҖРіР°РҪРёР·РҫРІР°СӮСҢ СҒ РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёРөРј СҖР°РҙРёРҫР»СғСҮРөРІСӢС…, Р°РәСӮРёРІРҪСӢС… РҳРҡ, СҒРөР№СҒРјРёСҮРөСҒРәРёС…, РӣР’Р’ или магРҪРёСӮРҫРјРөСӮСҖРёСҮРөСҒРәРёС… РЎРһ. РЁРёСҖРёРҪР° СғСҮР°СҒСӮРәР° РјРөСҒСӮРҪРҫСҒСӮРё, РҪР° РәРҫСӮРҫСҖРҫРј РұСғРҙСғСӮ СҖазмРөСүРөРҪСӢ РёР·-РІРөСүР°СӮРөли РҝРөСҖРІРҫРіРҫ Р РһРЎ, РҙРҫлжРҪР° СҒРҫСҒСӮавлСҸСӮСҢ РҫСӮ 8 РҙРҫ 10 Рј, СҒ СғСҮРөСӮРҫРј СӮРҫРіРҫ СҮСӮРҫ РҪР°СҖСғСҲРёСӮРөР»СҢ, РҙРІРёР¶СғСүРёР№СҒСҸ СҒРҫ СҒРәРҫСҖРҫСҒСӮСҢСҺ 4вҖҰ5 Рј/СҒ РұСғРҙРөСӮ РҙРҫ 2 СҒРөРәСғРҪРҙ РҪахРҫРҙРёСӮСҢСҒСҸ РІ РёС… Р·РҫРҪРө РҫРұРҪР°СҖСғР¶РөРҪРёСҸ, СҮСӮРҫ РІРҝРҫР»РҪРө РҙРҫСҒСӮР°СӮРҫСҮРҪРҫ РҙР»СҸ С„РҫСҖРјРёСҖРҫРІР°РҪРёСҸ СӮСҖРөРІРҫР¶РҪРҫРіРҫ РёР·РІРөСүРөРҪРёСҸ. РҡСҖРҫРјРө СӮРҫРіРҫ, РҪР° СҚСӮРҫРј СғСҮР°СҒСӮРәРө РјРҫР¶РҪРҫ СҖазмРөСҒСӮРёСӮСҢ РҡРЎРҹ, СҒРөСӮРәСғ-РҝСғСӮР°РҪРәСғ РІСӢСҒРҫСӮРҫР№ РҙРҫ 0,3 Рј или РҫРұСҠРөРјРҪСғСҺ РҗРҡРӣ, Р·Р°РәСҖРөРҝР»РөРҪРҪСғСҺ РҪРөРҝРҫСҒСҖРөРҙСҒСӮРІРөРҪРҪРҫ РҪР° РіСҖСғРҪСӮРө Рё РҫСҖРёРөРҪСӮРёСҖРҫРІР°РҪРҪСғСҺ СӮР°РәРёРј РҫРұСҖазРҫРј, СҮСӮРҫРұСӢ РҫРҪР° РҪРө СҒРҫР·Рҙавала РҝРҫРјРөС… РҙР»СҸ С„СғРҪРәСҶРёРҫРҪРёСҖРҫРІР°РҪРёСҸ РёР·РІРөСүР°СӮРө-Р»РөР№ Рё Р·РҪР°СҮРёСӮРөР»СҢРҪСӢС… Р·РҫРҪ Р·Р°СӮРөРҪРөРҪРёСҸ РҙР»СҸ РЎРўРқ. РӯСӮРҫ РҝРҫР·РІРҫлиСӮ Р·Р°РҙРөСҖжаСӮСҢ РҪР°СҖСғСҲРёСӮРөР»СҸ РІ Р·РҫРҪРө РҫРұРҪР°СҖСғР¶РөРҪРёСҸ Р РһРЎ Рё РҝРҫРІСӢСҒРёСӮСҢ РІРөСҖРҫСҸСӮРҪРҫСҒСӮСҢ РөРіРҫ РҝСҖавилСҢРҪРҫР№ РІРөСҖифиРәР°СҶРёРё.
РҡР°Рә СғР¶Рө РіРҫРІРҫСҖРёР»РҫСҒСҢ, СҒРёСҒСӮРөРјР° СӮРөР»РөРІРёР·РёРҫРҪРҪРҫРіРҫ РҪР°РұР»СҺРҙРөРҪРёСҸ РҪР° РҝРөСҖРёРјРөСӮСҖРө СҖРөСҲР°РөСӮ Р·Р°РҙР°СҮСғ РІРөСҖифиРәР°СҶРёРё СӮСҖРөРІРҫРі. ДлСҸ фиРәСҒРёСҖРҫРІР°РҪРёСҸ фаРәСӮР° РҝСҖРҫРҪРёРәРҪРҫРІРөРҪРёСҸ РҪР°СҖСғСҲРёСӮРөР»СҸ РҪР° РҫС…СҖР°РҪСҸРөРјСғСҺ СӮРөСҖСҖРёСӮРҫСҖРёСҺ СҒ РҝРҫРјРҫСүСҢСҺ РЎРўРқ РҪРөРҫРұС…РҫРҙРёРјРҫ РҝСҖРҫРІРөСҒСӮРё СҒРҫглаСҒРҫРІР°РҪРёРө РҝРҫР»РөР№ Р·СҖРөРҪРёСҸ СӮРөР»РөРІРёР·РёРҫРҪРҪСӢС… РәамРөСҖ Рё Р·РҫРҪ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РёР·РІРөСүР°СӮРөР»РөР№ РҝРөСҖРІРҫРіРҫ Р РһРЎ. РҹСҖРё СҚСӮРҫРј РҪРөРҫРұС…РҫРҙРёРјРҫ СғСҮРёСӮСӢРІР°СӮСҢ СҖазмРөСҖСӢ РұлижРҪРөР№ Р·РҫРҪСӢ Рё СӮСҖРөРұРҫРІР°РҪРёРө РҝРҫ РҫРұРөСҒРҝРөСҮРөРҪРёСҺ РјР°РәСҒималСҢРҪРҫРіРҫ РІСҖРөРјРөРҪРё РҝСҖРөРұСӢРІР°РҪРёСҸ РҪР°СҖСғСҲРёСӮРөР»СҸ РІ РҝРҫР»Рө Р·СҖРөРҪРёСҸ РўР’Рҡ.
РЎРҫглаСҒРҫРІР°РҪРёРө РҝРҫР»РөР№ Р·СҖРөРҪРёСҸ РўР’Рҡ Рё Р·РҫРҪ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РЎРһ РҝСҖРөРҙРҝРҫлагаРөСӮ СҖРөСҲРөРҪРёРө СҒР»РөРҙСғСҺСүРёС… РІРҫРҝСҖРҫСҒРҫРІ:
РқРөРҫРұС…РҫРҙРёРјРҫ РҪР° РҝСҖРҫСӮСҸР¶РөРҪРёРё РІСҒРөРіРҫ СҖСғРұРөжа РҫС…СҖР°РҪСӢ РҙРҫРұРёСӮСҢСҒСҸ СӮР°РәРҫРіРҫ взаимРҪРҫРіРҫ СҖР°СҒРҝРҫР»РҫР¶РөРҪРёСҸ РЎРһ Рё РўР’Рҡ, СҮСӮРҫРұСӢ РҪР°СҖСғСҲРёСӮРөР»СҢ РҝСҖРё РҙРІРёР¶РөРҪРёРё Рә РҫРұСҠРөРәСӮСғ Р·Р°СүРёСӮСӢ СҒРҪР°СҮала РҝРҫРҝР°Рҙал РІ Р·РҫРҪСғ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РЎРһ, Р° Р·Р°СӮРөРј (СҮРөСҖРөР· 1вҖҰ2 СҒРөРәСғРҪРҙСӢ) вҖ“ РІ РҝРҫР»Рө Р·СҖРөРҪРёСҸ СҒРҫРҫСӮРІРөСӮСҒСӮРІСғСҺСүРөР№ РўР’Рҡ. РҹРҫСҒР»Рө РІСӢСҖР°РұРҫСӮРәРё СҒСҖРөРҙСҒСӮРІРҫРј РҫРұРҪР°СҖСғР¶РөРҪРёСҸ СӮСҖРөРІРҫР¶РҪРҫРіРҫ РёР·РІРөСүРөРҪРёСҸ РҪР° СҚРәСҖР°РҪ СӮСҖРөРІРҫР¶РҪРҫРіРҫ РјРҫРҪРёСӮРҫСҖР° РҙРҫлжРҪРҫ РІСӢРІРҫРҙРёСӮСҢСҒСҸ РёР·РҫРұСҖажРөРҪРёРө СӮРҫРіРҫ СғСҮР°СҒСӮРәР° СҖСғРұРөжа РҫС…СҖР°РҪСӢ, РіРҙРө РёР·РІРөСүР°СӮРөР»СҢ зафиРәСҒРёСҖРҫвал РҝСҖРҫРҪРёРәРҪРҫРІРөРҪРёРө РҪР°СҖСғСҲРёСӮРөР»СҸ РҪР° РҫС…СҖР°РҪСҸРөРјСғСҺ СӮРөСҖСҖРёСӮРҫСҖРёСҺ.
РЎРҫРІРҫРәСғРҝРҪРҫСҒСӮСҢ РҝРҫР»РөР№ Р·СҖРөРҪРёСҸ СҒСӮР°СҶРёРҫРҪР°СҖРҪСӢС… РўР’Рҡ, СғСҒСӮР°РҪРҫРІР»РөРҪРҪСӢС… РҪР° РҝРөСҖРёРјРөСӮСҖРө РҫС…СҖР°РҪСҸРөРјРҫРіРҫ РҫРұСҠРөРәСӮР° РІ СҒРҫСҒСӮавРө СҖСғРұРөР¶РөР№ РҫС…СҖР°РҪСӢ, РҙРҫлжРҪР° СҒРҫСҒСӮавлСҸСӮСҢ РҪРөРҝСҖРөСҖСӢРІРҪСӢР№ РІ РҝСҖРҫСҒСӮСҖР°РҪСҒСӮРІРө СҖСғРұРөР¶ РІРёРҙРөРҫРәРҫРҪСӮСҖРҫР»СҸ. РқаиРұРҫР»РөРө СғСҸР·РІРёРјСӢРјРё РјРөСҒСӮами СҚСӮРҫРіРҫ СҖСғРұРөжа СҸРІР»СҸСҺСӮСҒСҸ Р·РҫРҪСӢ Р·Р°СӮРөРҪРөРҪРёСҸ РҝРҫР»РөР№ Р·СҖРөРҪРёСҸ РўР’Рҡ РҪРөРҝСҖРҫР·СҖР°СҮРҪСӢРјРё РҝСҖРөРҙРјРөСӮами (физиСҮРөСҒРәРёРјРё РұР°СҖСҢРөСҖами Рё РҝСҖРҫСҮРёРјРё СҚР»РөРјРөРҪСӮами РёРҪР¶РөРҪРөСҖРҪРҫР№ РёРҪС„СҖР°СҒСӮСҖСғРәСӮСғСҖСӢ), СҖазмРөСүРөРҪРҪСӢРјРё РҪР° РҝРөСҖРёРјРөСӮСҖРө, Р° СӮР°РәР¶Рө РұлижРҪРёРө Р·РҫРҪСӢ РҝРҫР»РөР№ Р·СҖРөРҪРёСҸ РәажРҙРҫР№ РўР’Рҡ. РЈРјРөРҪСҢСҲРөРҪРёРө РәРҫлиСҮРөСҒСӮРІР° Рё СҖазмРөСҖРҫРІ Р·РҫРҪ Р·Р°СӮРөРҪРөРҪРёСҸ РҙРҫСҒСӮРёРіР°РөСӮСҒСҸ Р·Р° СҒСҮРөСӮ:
РҳР·РҫРұСҖажРөРҪРёРө РұлижРҪРёС… Р·РҫРҪ РҝСҖРөРҙСҒСӮавлРөРҪРҫ РҪР° СҖРёСҒ. 2. РҳРјРөРҪРҪРҫ СҲРёСҖРёРҪР° РұлижРҪРёС… Р·РҫРҪ РҝРҫР»РөР№ Р·СҖРөРҪРёСҸ РўР’Рҡ РҫРҝСҖРөРҙРөР»СҸРөСӮ РјРёРҪималСҢРҪСғСҺ СҲРёСҖРёРҪСғ СҖСғРұРөжа РІРёРҙРөРҫРәРҫРҪСӮСҖРҫР»СҸ. РЁРёСҖРёРҪР° СҚСӮРҫРіРҫ СҖСғРұРөжа РІ СҒРҫРІРҫРәСғРҝРҪРҫСҒСӮРё СҒРҫ СҒРәРҫСҖРҫСҒСӮСҢСҺ РҙРІРёР¶РөРҪРёСҸ РҪР°СҖСғСҲРёСӮРөР»СҸ РҫРҝСҖРөРҙРөР»СҸРөСӮ РІСҖРөРјСҸ, РІ СӮРөСҮРөРҪРёРө РәРҫСӮРҫСҖРҫРіРҫ РҪР°СҖСғСҲРёСӮРөР»СҢ РҪахРҫРҙРёСӮСҒСҸ РІ РҝРҫР»Рө Р·СҖРөРҪРёСҸ РәамРөСҖСӢ, Рё, СҒР»РөРҙРҫРІР°СӮРөР»СҢРҪРҫ, РІРҫР·РјРҫР¶РҪРҫСҒСӮСҢ СҖРөСҲРөРҪРёСҸ Р·Р°РҙР°СҮРё РІРөСҖифиРәР°СҶРёРё СӮСҖРөРІРҫРіРё. РЎ РҙСҖСғРіРҫР№ СҒСӮРҫСҖРҫРҪСӢ, СҲРёСҖРёРҪР° СҖСғРұРөжа РІРёРҙРөРҫРәРҫРҪСӮСҖРҫР»СҸ РҫРҝСҖРөРҙРөР»СҸРөСӮСҒСҸ РјР°СҒСҲСӮР°РұРҫРј РҪР°РұР»СҺРҙРөРҪРёСҸ, СҒРҫРҫСӮРІРөСӮСҒСӮРІРөРҪРҪРҫ СғРіР»РҫРј РҝРҫР»СҸ Р·СҖРөРҪРёСҸ, СҲагРҫРј СҖР°СҒСҒСӮР°РҪРҫРІРәРё РәамРөСҖ, РІСӢСҒРҫСӮРҫР№ СӮРҫСҮРөРә РёС… СғСҒСӮР°РҪРҫРІРәРё.
РҹРҫСҸСҒРҪРёРј СҚСӮРҫ РҪР° РҝСҖРёРјРөСҖРө.
РқРөРҫРұС…РҫРҙРёРјСӢР№ РјР°СҒСҲСӮР°Рұ РҪР°РұР»СҺРҙРөРҪРёСҸ РҙР»СҸ СҖРөСҲРөРҪРёСҸ РҫРҝРөСҖР°СӮРёРІРҪРҫР№ Р·Р°РҙР°СҮРё РІРөСҖифиРәР°СҶРёРё СӮСҖРөРІРҫРі РҪР° РҝРөСҖРёРјРөСӮСҖРө РҝСҖРёРІРҫРҙРёСӮ Рә Р·СҖРёСӮРөР»СҢРҪРҫР№ Р·Р°РҙР°СҮРө РҫРҝРҫР·РҪаваРҪРёСҸ СҖРҫСҒСӮРҫРІРҫР№ фигСғСҖСӢ СҮРөР»РҫРІРөРәР°. РһРҙРёРҪ РёР· СҒРҝРҫСҒРҫРұРҫРІ РІСӢСҮРёСҒР»РөРҪРёСҸ РҪРөРҫРұС…РҫРҙРёРјРҫРіРҫ РјР°СҒСҲСӮР°РұР° РҙР»СҸ СҖРөСҲРөРҪРёСҸ СҚСӮРҫР№ Р·СҖРёСӮРөР»СҢРҪРҫР№ Р·Р°РҙР°СҮРё РҫСҒРҪРҫРІСӢРІР°РөСӮСҒСҸ РҪР° РәСҖРёСӮРөСҖРёСҸС… ДжРҫРҪСҒРҫРҪР°. РҡСҖРёСӮРөСҖРёР№ РҫРҝРҫР·РҪаваРҪРёСҸ РҙР»СҸ СҚффРөРәСӮРёРІРҪРҫРіРҫ СҖазмРөСҖР° фигСғСҖСӢ СҮРөР»РҫРІРөРәР° (0,2 Рј) СҖавРөРҪ РҫСӮ 3 РҙРҫ 4 TVL. Р’СӢРұРёСҖР°СҸ РјРҫРҪРҫС…СҖРҫРјРҪСғСҺ РәамРөСҖСғ РІСӢСҒРҫРәРҫРіРҫ СҖазСҖРөСҲРөРҪРёСҸ (570 TVL), РҝРҫР»СғСҮРёРј СҲРёСҖРёРҪСғ РҝРҫР»СҸ Р·СҖРөРҪРёСҸ РҪР° РҙалСҢРҪРөРј РҝлаРҪРө (W) РҫРәРҫР»Рҫ 30 Рј.
Р’ РҝРөСҖРёРјРөСӮСҖРҫРІСӢС… СҒРёСҒСӮРөмах СҒСӮР°СҶРёРҫРҪР°СҖРҪСӢРө РәамРөСҖСӢ СғСҒСӮР°РҪавливаСҺСӮСҒСҸ РәР°СҒРәР°РҙРҪРҫ вҖ“ СӮР°РәРёРј РҫРұСҖазРҫРј, СҮСӮРҫРұСӢ РәажРҙР°СҸ РҝСҖРөРҙСӢРҙСғСүР°СҸ РәамРөСҖР° РҝРөСҖРөРәСҖСӢвала РјРөСҖСӮРІСғСҺ Р·РҫРҪСғ РҝРҫСҒР»РөРҙСғСҺСүРөР№. Р’СӢСҒРҫСӮР° СғСҒСӮР°РҪРҫРІРәРё РәамРөСҖ СҮР°СүРө РІСҒРөРіРҫ РІСӢРұРёСҖР°РөСӮСҒСҸ РҙРҫ 4,5 Рј (РҙР»СҸ РҝСҖРҫСҒСӮРҫСӮСӢ РҫРұСҒР»СғживаРҪРёСҸ), Р° СҲаг СҖР°СҒСҒСӮР°РҪРҫРІРәРё РәамРөСҖ РІ СҒРҫРҫСӮРІРөСӮСҒСӮРІРёРё СҒ СҖРөРәРҫРјРөРҪРҙР°СҶРёСҸРјРё РңР’Р” вҖ“ СҖавРҪСӢРј 50 Рј. РўР°РәРёРј РҫРұСҖазРҫРј, РјР°РәСҒималСҢРҪР°СҸ РҙалСҢРҪРҫСҒСӮСҢ РҪР°РұР»СҺРҙРөРҪРёСҸ РҙР»СҸ РәажРҙРҫР№ РәамРөСҖСӢ (L) РұСғРҙРөСӮ СҒРҫСҒСӮавлСҸСӮСҢ РҫРәРҫР»Рҫ 60 Рј, РҝРҫСҒРәРҫР»СҢРәСғ РјРөСҖСӮРІР°СҸ Р·РҫРҪР° РІ СӮР°РәРҫРј СҒР»СғСҮР°Рө СҖавРҪР° ~10 Рј.
РқРөРҫРұС…РҫРҙРёРјРҫРө С„РҫРәСғСҒРҪРҫРө СҖР°СҒСҒСӮРҫСҸРҪРёРө РҙР»СҸ СӮР°РәРҫРіРҫ РҝРҫР»СҸ Р·СҖРөРҪРёСҸ РІСӢСҮРёСҒР»СҸРөСӮСҒСҸ РёР· РҝСҖРҫРҝРҫСҖСҶРёРё: W/w = L/f, РіРҙРө w вҖ“ СҲРёСҖРёРҪР° СҒРөРҪСҒРҫСҖР° РІСӢРұСҖР°РҪРҪРҫРіРҫ С„РҫСҖРјР°СӮР° (РјРј), f вҖ“ С„РҫРәСғСҒРҪРҫРө СҖР°СҒСҒСӮРҫСҸРҪРёРө РҫРұСҠРөРәСӮРёРІР° (РјРј).
РўРҫРіРҙР° РҙР»СҸ РәамРөСҖСӢ С„РҫСҖРјР°СӮР° 1,3" С„РҫРәСғСҒРҪРҫРө СҖР°СҒСҒСӮРҫСҸРҪРёРө РҫРұСҠРөРәСӮРёРІР°, РҫРұРөСҒРҝРөСҮРёРІР°СҺСүРөРіРҫ РҪСғР¶РҪСӢР№ РјР°СҒСҲСӮР°Рұ РҪР°РұР»СҺРҙРөРҪРёСҸ, РұСғРҙРөСӮ СҖавРҪРҫ 9,6 РјРј. РһСҒРҪРҫРІРҪРҫРө загСҖажРҙРөРҪРёРө (РһР—1) СғСҒСӮР°РҪавливаРөСӮСҒСҸ РҪР° СҖР°СҒСҒСӮРҫСҸРҪРёРё РҙРҫ 3 Рј РҫСӮ СҖСғРұРөжа РҫС…СҖР°РҪРҪРҫР№ СҒРёРіРҪализаСҶРёРё СҒ СӮР°РәРёРј СҖР°СҒСҮРөСӮРҫРј, СҮСӮРҫРұСӢ РҫРҪРҫ РҝРҫР»РҪРҫСҒСӮСҢСҺ РҪахРҫРҙРёР»РҫСҒСҢ РІ Р·РҫРҪРө СҖСғРұРөжа РІРёРҙРөРҫРәРҫРҪСӮСҖРҫР»СҸ (СҖРёСҒ. 2). РһР—1 РҝСҖРөРҙРҪазРҪР°СҮРөРҪРҫ РҙР»СҸ Р·Р°РҙРөСҖжаРҪРёСҸ РҪР°СҖСғСҲРёСӮРөР»СҸ (РҪР° РІСҖРөРјСҸ РҙРҫ 20 СҒРөРәСғРҪРҙ). РҳРјРөРҪРҪРҫ СӮР°РәРҫРө СҖР°СҒРҝРҫР»РҫР¶РөРҪРёРө РҫСҒРҪРҫРІРҪРҫРіРҫ загСҖажРҙРөРҪРёСҸ РҝРҫР·РІРҫлиСӮ:
РһР—1 РјРҫР¶РҪРҫ РҫРұРҫСҖСғРҙРҫРІР°СӮСҢ РёР·РІРөСүР°СӮРөР»РөРј РІРёРұСҖР°СҶРёРҫРҪРҪРҫРіРҫ СӮРёРҝР° РҙР»СҸ РҝРҫРҙСӮРІРөСҖР¶РҙРөРҪРёСҸ фаРәСӮР° РҝСҖРөРҫРҙРҫР»РөРҪРёСҸ РҪР°СҖСғСҲРёСӮРөР»РөРј СҚСӮРҫРіРҫ загСҖажРҙРөРҪРёСҸ Рё РҫРҝСҖРөРҙРөР»РөРҪРёСҸ РјРөСҒСӮР° РҝСҖРҫРҪРёРәРҪРҫРІРөРҪРёСҸ РҪР°СҖСғСҲРёСӮРөР»СҸ РҪР° СӮРөСҖСҖРёСӮРҫСҖРёСҺ РҫС…СҖР°РҪСҸРөРјРҫРіРҫ РҫРұСҠРөРәСӮР°.
Р’РҪСғСӮСҖРөРҪРҪРөРө РҝСҖРөРҙСғРҝСҖРөРҙРёСӮРөР»СҢРҪРҫРө загСҖажРҙРөРҪРёРө (РҹР—2) СғСҒСӮР°РҪавливаРөСӮСҒСҸ РҪР° СҖР°СҒСҒСӮРҫСҸРҪРёРё РҙРҫ 5 Рј РҫСӮ РҫСҒРҪРҫРІРҪРҫРіРҫ загСҖажРҙРөРҪРёСҸ (031) Рё РҝСҖРөРҙРҪазРҪР°СҮРөРҪРҫ РҙР»СҸ РҝСҖРөРҙРҫСӮРІСҖР°СүРөРҪРёСҸ РҝРҫРҝР°РҙР°РҪРёСҸ РҝРҫСҒСӮРҫСҖРҫРҪРҪРёС… лиСҶ (СҖР°РұРҫСӮРҪРёРәРҫРІ РҫС…СҖР°РҪСҸРөРјРҫРіРҫ РҫРұСҠРөРәСӮР°) РҪР° СӮРөСҖСҖРёСӮРҫСҖРёСҺ СҖСғРұРөжа РҫС…СҖР°РҪСӢ. РҡСҖРҫРјРө СӮРҫРіРҫ, РҹР—2 СҸРІР»СҸРөСӮСҒСҸ РҙРҫРҝРҫР»РҪРёСӮРөР»СҢРҪСӢРј РҝСҖРөРҝСҸСӮСҒСӮРІРёРөРј РҪР° РҝСғСӮРё РҙРІРёР¶РөРҪРёСҸ РҪР°СҖСғСҲРёСӮРөР»СҸ.
РЎС„РҫСҖРјРёСҖРҫРІР°РҪРҪСӢР№ СӮР°РәРёРј РҫРұСҖазРҫРј СҖСғРұРөР¶ РҫС…СҖР°РҪСӢ РҝРҫР·РІРҫлиСӮ Р·РҪР°СҮРёСӮРөР»СҢРҪРҫ РҝРҫРІСӢСҒРёСӮСҢ СҚффРөРәСӮРёРІРҪРҫСҒСӮСҢ С„СғРҪРәСҶРёРҫРҪРёСҖРҫРІР°РҪРёСҸ СҒРёСҒСӮРөРјСӢ физиСҮРөСҒРәРҫР№ Р·Р°СүРёСӮСӢ РҫС…СҖР°РҪСҸРөРјРҫРіРҫ РҫРұСҠРөРәСӮР°.
РһСҶРөРҪРәР° СҚффРөРәСӮРёРІРҪРҫСҒСӮРё РҝСҖРөРҙлагаРөРјРҫР№ СҒСӮСҖСғРәСӮСғСҖСӢ РІРҪРөСҲРҪРөРіРҫ СҖСғРұРөжа РҫС…СҖР°РҪСӢ РҝСҖРҫРІРҫРҙилаСҒСҢ РҪР° РҫСҒРҪРҫРІР°РҪРёРё РөРө СҒСҖавРҪРөРҪРёСҸ СҒРҫ СҒСӮСҖСғРәСӮСғСҖРҫР№ СҖСғРұРөжа РҫС…СҖР°РҪСӢ, РІ РәРҫСӮРҫСҖРҫР№ РҫСҒРҪРҫРІРҪРҫРө загСҖажРҙРөРҪРёРө СғСҒСӮР°РҪавливаРөСӮСҒСҸ РҪР° РіСҖР°РҪРёСҶРө РҫС…СҖР°РҪСҸРөРјРҫРіРҫ РҫРұСҠРөРәСӮР° (СҖРёСҒ. 1).
РҹСҖРё СҚСӮРҫРј РёСҒРҝРҫР»СҢР·РҫвалаСҒСҢ РјР°СӮРөРјР°СӮРёСҮРөСҒРәР°СҸ РјРҫРҙРөР»СҢ РҫСҶРөРҪРәРё СҚффРөРәСӮРёРІРҪРҫСҒСӮРё РҳРҡРЎРӨР— РҪР° РҫСҒРҪРҫРІРө РҝСҖРҫРіРҪРҫР·РёСҖРҫРІР°РҪРёСҸ РҙРІРёР¶РөРҪРёСҸ РҪР°СҖСғСҲРёСӮРөР»СҸ. РһСҶРөРҪРәР° СҚффРөРәСӮРёРІРҪРҫСҒСӮРё РҳРҡРЎРӨР— РҫС…СҖР°РҪСҸРөРјРҫРіРҫ РҫРұСҠРөРәСӮР° РҝСҖРҫРёР·РІРҫРҙРёСӮСҒСҸ РҪР° РҫСҒРҪРҫРІР°РҪРёРё РҫСҶРөРҪРәРё РҝСҖРҫРіРҪРҫР·РёСҖСғРөРјРҫРіРҫ РІСҖРөРјРөРҪРё РҫРҝРөСҖРөР¶РөРҪРёСҸ СҒР»СғР¶РұРҫР№ РҫС…СҖР°РҪСӢ РҪР°СҖСғСҲРёСӮРөР»СҸ, РҝСҖРёРұСӢРІСҲРөРіРҫ Рә РҫРұСҠРөРәСӮСғ Р·Р°СүРёСӮСӢ.
∆Рў = tРҪ min вҖ“ tРҫ,
РіРҙРө tРҪ min вҖ“ РјРёРҪималСҢРҪРҫ РІРҫР·РјРҫР¶РҪРҫРө РІСҖРөРјСҸ РҙРІРёР¶РөРҪРёСҸ РҪР°СҖСғСҲРёСӮРөР»СҸ РҫСӮ СӮРҫСҮРәРё РҪР°СҮала РҙРІРёР¶РөРҪРёСҸ РҪР°СҖСғСҲРёСӮРөР»СҸ РҙРҫ РҫРұСҠРөРәСӮР° Р·Р°СүРёСӮСӢ, tРҫ вҖ“ РІСҖРөРјСҸ РҙРІРёР¶РөРҪРёСҸ СҒРёР» РҫС…СҖР°РҪСӢ РҫСӮ РәР°СҖР°СғР»СҢРҪРҫРіРҫ РҝРҫРјРөСүРөРҪРёСҸ РҙРҫ РҫРұСҠРөРәСӮР° Р·Р°СүРёСӮСӢ.
РҹСҖРё СҚСӮРҫРј РҙРҫлжРҪРҫ РІСӢРҝРҫР»РҪСҸСӮСҢСҒСҸ РҪРөСҖавРөРҪСҒСӮРІРҫ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё:
∆Рў > ∆РўРҝРҪРҪ,
РіРҙРө ∆РўРҝРҪРҪ вҖ“ РјРёРҪималСҢРҪРҫ РҙРҫРҝСғСҒСӮРёРјРҫРө РІСҖРөРјСҸ РҫРҝРөСҖРөР¶РөРҪРёСҸ СҒР»СғР¶РұРҫР№ РҫС…СҖР°РҪСӢ РҪР°СҖСғСҲРёСӮРөР»СҸ, РҪРөРҫРұС…РҫРҙРёРјРҫРө РҙР»СҸ РҝРҫРҙРіРҫСӮРҫРІРәРё Рә РөРіРҫ РҪРөР№СӮСҖализаСҶРёРё.
РһРҝРёСҖР°СҸСҒСҢ РҪР° РҙР°РҪРҪСғСҺ РјРҫРҙРөР»СҢ, РұСӢли РҝСҖРҫРІРөРҙРөРҪСӢ РёСҒСҒР»РөРҙРҫРІР°РҪРёСҸ СғСҒР»РҫРІРҪРҫРіРҫ РҫРұСҠРөРәСӮР°, РіРҙРө РұСӢли СҖР°СҒСҒРјРҫСӮСҖРөРҪСӢ РҫРұР° СҒР»СғСҮР°СҸ РҝРҫСҒСӮСҖРҫРөРҪРёСҸ СҒРёСҒСӮРөРјСӢ Р·Р°СүРёСӮСӢ РҝРөСҖРёРјРөСӮСҖР°.
Р Р°СҒСҒРјРҫСӮСҖРёРј РҫРұРө СҒРёСҒСӮРөРјСӢ РІ РҫРұСҖР°СӮРҪРҫРј РҝРҫСҖСҸРҙРәРө. Р’ СҒРёСҒСӮРөРјРө, РҫРұРөСҒРҝРөСҮРёРІР°СҺСүРөР№ РҪР°РҙРөР¶РҪСғСҺ РІРөСҖифиРәР°СҶРёСҺ СӮСҖРөРІРҫРіРё, РҪР°СҖСғСҲРёСӮРөли РҫРұРҪР°СҖСғживаСҺСӮСҒСҸ СғР¶Рө РҪР° РҝРөСҖРёРјРөСӮСҖРө, РҝРҫСҚСӮРҫРјСғ РёС… РҙРІРёР¶РөРҪРёРө РҙРҫ РҫРұСҠРөРәСӮР° Р·Р°СүРёСӮСӢ СҒРәлаРҙСӢРІР°РөСӮСҒСҸ РёР· РҝРҫР»РҪРҫРіРҫ РҪР°РұРҫСҖР° РҝСҖРөРҝСҸСӮСҒСӮРІРёР№ Рё РҫСӮСҖРөР·РәРҫРІ РҝСғСӮРё. Р’ РёСҒСҒР»РөРҙСғРөРјРҫРј СғСҒР»РҫРІРҪРҫРј РҫРұСҠРөРәСӮРө РІСҖРөРјСҸ РҙРІРёР¶РөРҪРёСҸ РҪР°СҖСғСҲРёСӮРөР»РөР№ СҒРҫСҒСӮавлСҸРөСӮ РҫСӮ 113 РҙРҫ 265 СҒРөРәСғРҪРҙ РІ завиСҒРёРјРҫСҒСӮРё РҫСӮ СҖР°СҒРҝРҫР»РҫР¶РөРҪРёСҸ СҒСӮР°СҖСӮРҫРІРҫР№ СӮРҫСҮРәРё. Р—Р° РҙР°РҪРҪРҫРө РІСҖРөРјСҸ СҒРёР»СӢ СҖРөагиСҖРҫРІР°РҪРёСҸ РјРҫРіСғСӮ РәР°Рә РҝСҖРёРҪСҸСӮСҢ СҖРөСҲРөРҪРёРө, СӮР°Рә Рё РҝСҖРөРҙРҝСҖРёРҪСҸСӮСҢ СҒРҫРҫСӮРІРөСӮСҒСӮРІСғСҺСүРёРө РҙРөР№СҒСӮРІРёСҸ РҝРҫ РҪРөР№СӮСҖализаСҶРёРё РҪР°СҖСғСҲРёСӮРөР»СҸ.
Р’ СғСҒР»РҫРІРҪРҫРј РҫРұСҠРөРәСӮРө, РҪРө РҫРұРөСҒРҝРөСҮРёРІР°СҺСүРөРј РҪР°РҙРөР¶РҪСғСҺ РІРөСҖифиРәР°СҶРёСҺ СӮСҖРөРІРҫРіРё, СҒСҖРөРҙСҒСӮРІР° РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РҙР°СҺСӮ СҒРёРіРҪал Рҫ СҒСҖР°РұР°СӮСӢРІР°РҪРёРё РёР·РІРөСүР°-СӮРөР»СҸ, РҪРҫ РҝСҖРё РҫСӮСҒСғСӮСҒСӮРІРёРё СҒРІРҫРөРІСҖРөРјРөРҪРҪРҫРіРҫ РҝРҫРҙСӮРІРөСҖР¶РҙРөРҪРёСҸ СӮСҖРөРІРҫРіРё РҫСӮ РЎРўРқ РҙР°РҪРҪСӢР№ СҒРёРіРҪал РјРҫР¶РөСӮ РұСӢСӮСҢ РІРҫСҒРҝСҖРёРҪСҸСӮ РәР°Рә Р»РҫР¶РҪРҫРө СҒСҖР°РұР°СӮСӢРІР°РҪРёРө. РўРҫ РөСҒСӮСҢ РҙалРөРө РҪР°СҖСғСҲРёСӮРөР»СҢ РҙРІРёР¶РөСӮСҒСҸ РҝРҫ РҫРұСҠРөРәСӮСғ, РҪРҫ СҒРёР»СӢ РҫС…СҖР°РҪСӢ РөСүРө РҪРө РҝСҖРөРҙРҝСҖРёРҪРёРјР°СҺСӮ РҪРёРәР°РәРёС… РҙРөР№СҒСӮРІРёР№. РЎР»РөРҙСғСҺСүРёРј СҖСғРұРөР¶РҫРј РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РҪР°СҖСғСҲРёСӮРөР»СҸ РјРҫРіСғСӮ СҒСӮР°СӮСҢ РҙРІРөСҖРё, РҫРәРҪР°, СҒСӮРөРҪСӢ, РІРҪСғСӮСҖРөРҪРҪРёРө РҫРұСҠРөРјСӢ РҫС…СҖР°РҪСҸРөРјСӢС… Р·РҙР°РҪРёР№ Рё СҒРҫРҫСҖСғР¶РөРҪРёР№. РҹСҖРёСҮРөРј РҫСҮРөРҪСҢ РІРөлиРәР° РІРөСҖРҫСҸСӮРҪРҫСҒСӮСҢ СӮРҫРіРҫ, СҮСӮРҫ РҙРҫ РҪРёС… РҪР°СҖСғСҲРёСӮРөР»СҺ СғРҙР°СҒСӮСҒСҸ РҙРҫРұСҖР°СӮСҢСҒСҸ РҪРөзамРөСҮРөРҪРҪСӢРј.
РңСӢ СҖР°СҒСҒРјР°СӮСҖРёРІР°РөРј СӮР°Рә или РёРҪР°СҮРө РҫРҝСӮРёРјРёСҒСӮРёСҮРөСҒРәРёР№ РІР°СҖРёР°РҪСӮ, РәРҫРіРҙР° РҪР°СҖСғСҲРёСӮРөР»СҢ РҫРұРҪР°СҖСғР¶РөРҪ СӮРөС…РҪРёСҮРөСҒРәРёРјРё СҒСҖРөРҙСҒСӮвами, СҖР°СҒРҝРҫР»РҫР¶РөРҪРҪСӢРјРё РІ Р·РҙР°РҪРёСҸС… Рё СҒРҫРҫСҖСғР¶РөРҪРёСҸС…, РҝРҫСҒР»Рө СҮРөРіРҫ РҫРҪ РҙРІРёР¶РөСӮСҒСҸ РҝРҫ РјРёРҪималСҢРҪРҫРјСғ РҝРҫ РІСҖРөРјРөРҪРё РҝСғСӮРё Рә РҫРұСҠРөРәСӮСғ Р·Р°СүРёСӮСӢ. ДлСҸ СҖР°СҒСҒРјР°СӮСҖРёРІР°РөРјРҫРіРҫ СғСҒР»РҫРІРҪРҫРіРҫ РҫРұСҠРөРәСӮР° РҙР°РҪРҪРҫРө РІСҖРөРјСҸ СҒРҫСҒСӮавлСҸРөСӮ РҫСӮ 24 РҙРҫ 167 СҒРөРәСғРҪРҙ, СҮСӮРҫ Р·РҪР°СҮРёСӮРөР»СҢРҪРҫ РјРөРҪСҢСҲРө РІСҖРөРјРөРҪРё РҙРІРёР¶РөРҪРёСҸ РҪР°СҖСғСҲРёСӮРөР»СҸ, РҝСҖРёРІРөРҙРөРҪРҪРҫРіРҫ РІСӢСҲРө.
РҳСӮР°Рә, РёСҒСҒР»РөРҙРҫРІР°РҪРёСҸ РҝРҫРәазСӢРІР°СҺСӮ, СҮСӮРҫ, РІ завиСҒРёРјРҫСҒСӮРё РҫСӮ РҫСҖРіР°РҪРёР·Р°СҶРёРё СҒРёСҒСӮРөРјСӢ Р·Р°СүРёСӮСӢ РҝРөСҖРёРјРөСӮСҖР°, РІ РҪР°СҲРөРј СҒР»СғСҮР°Рө взаимРҫРҙРөР№СҒСӮРІРёСҸ СҒСҖРөРҙСҒСӮРІ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ Рё РЎРўРқ РІСҖРөРјСҸ, РәРҫСӮРҫСҖРҫРө РөСҒСӮСҢ Сғ СҒРёР» РҫС…СҖР°РҪСӢ РҙР»СҸ РҪРөР№СӮСҖализаСҶРёРё РҪР°СҖСғСҲРёСӮРөР»СҸ, РјРҫР¶РөСӮ СҖазлиСҮР°СӮСҢСҒСҸ РІ 5 СҖаз. Рҳ РөСҒли 2 РјРёРҪСғСӮСӢ вҖ“ РҙРөР№СҒСӮРІРёСӮРөР»СҢРҪРҫ РҙРҫСҒСӮР°СӮРҫСҮРҪРҫРө РІСҖРөРјСҸ РҙР»СҸ СҒРІРҫРөРІСҖРөРјРөРҪРҪРҫРіРҫ РҝСҖРёРұСӢСӮРёСҸ СҒРёР» РҫС…СҖР°РҪСӢ Рә РҫРұСҠРөРәСӮСғ Р·Р°СүРёСӮСӢ, СӮРҫ 24 СҒРөРәСғРҪРҙ РұСғРҙРөСӮ СҸРІРҪРҫ РҪРөРҙРҫСҒСӮР°СӮРҫСҮРҪРҫ. РҳРјРөРҪРҪРҫ РҝРҫСҚСӮРҫРјСғ СҖРөСҲРөРҪРёРө РҫРұ СғСҒСӮР°РҪРҫРІРәРө СҖСғРұРөР¶РөР№ Р·Р°СүРёСӮСӢ, СҒСҖРөРҙСҒСӮРІ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ, РҪР°СҒСӮСҖРҫР№РәРө взаимРҫРҙРөР№СҒСӮРІРёСҸ СҒ РҝСҖРҫСҮРёРјРё СҒРёСҒСӮРөмами РҙРҫлжРҪРҫ РёРјРөСӮСҢ РҝРҫРҙ СҒРҫРұРҫР№ Р°РҪалиСӮРёСҮРөСҒРәСғСҺ РұазСғ Рё РұСӢСӮСҢ РҫСҒРҪРҫРІР°РҪРҫ РҪРө РҪР° РјРҪРөРҪРёРё, Р° РҪР° СҖР°СҒСҮРөСӮах Рё СҖазСҖР°РұРҫСӮР°РҪРҪСӢС… РјРҫРҙРөР»СҸС… СҒРёСҒСӮРөРјСӢ.
РһРҝСғРұлиРәРҫРІР°РҪРҫ: Р–СғСҖРҪал "РЎРёСҒСӮРөРјСӢ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё" #5, 2010
РҹРҫСҒРөСүРөРҪРёР№: 14238
РҗРІСӮРҫСҖ
| |||
РҗРІСӮРҫСҖ
| |||
Р’ СҖСғРұСҖРёРәСғ "РҡРҫРјРҝР»РөРәСҒРҪСӢРө СҖРөСҲРөРҪРёСҸ. РҳРҪСӮРөРіСҖРёСҖРҫРІР°РҪРҪСӢРө СҒРёСҒСӮРөРјСӢ" | Рҡ СҒРҝРёСҒРәСғ СҖСғРұСҖРёРә | Рҡ СҒРҝРёСҒРәСғ авСӮРҫСҖРҫРІ | Рҡ СҒРҝРёСҒРәСғ РҝСғРұлиРәР°СҶРёР№



