






Р’ СҖСғРұСҖРёРәСғ "РЎРёСҒСӮРөРјСӢ РәРҫРҪСӮСҖРҫР»СҸ Рё СғРҝСҖавлРөРҪРёСҸ РҙРҫСҒСӮСғРҝРҫРј (РЎРҡРЈР”)" | Рҡ СҒРҝРёСҒРәСғ СҖСғРұСҖРёРә | Рҡ СҒРҝРёСҒРәСғ авСӮРҫСҖРҫРІ | Рҡ СҒРҝРёСҒРәСғ РҝСғРұлиРәР°СҶРёР№
РҗРәСӮСғалСҢРҪРҫСҒСӮСҢ СҖРөСҲРөРҪРёСҸ Р·Р°РҙР°СҮРё авСӮРҫРјР°СӮРёР·Р°СҶРёРё РҫРұРҪР°СҖСғР¶РөРҪРёСҸ Р·Р°РҝСҖРөСүРөРҪРҪСӢС… Рә РҝСҖРҫРҪРҫСҒСғ РјРөСӮаллиСҮРөСҒРәРёС… РҝСҖРөРҙРјРөСӮРҫРІ РҪР° РҡРҹРҹ РҫРұСҠСҸСҒРҪСҸРөСӮСҒСҸ РҪРөСҚффРөРәСӮРёРІРҪРҫСҒСӮСҢСҺ РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёСҸ РҫРҝРөСҖР°СӮРёРІРҪРҫРіРҫ РҝРөСҖСҒРҫРҪала РҙР»СҸ РҙРҫСҒРјРҫСӮСҖР° РҝСҖРҫС…РҫРҙСҸСүРёС… лиСҶ (СҒРҫСӮСҖСғРҙРҪРёРәРҫРІ Рё РҝРҫСҒРөСӮРёСӮРөР»РөР№ РҫРұСҠРөРәСӮР°). РӯСӮРҫ РёРјРөРөСӮ РҫСҒРҫРұРҫРө Р·РҪР°СҮРөРҪРёРө РҙР»СҸ РәСҖСғРҝРҪСӢС… Рё СҒСҖРөРҙРҪРёС… РәСҖРёСӮРёСҮРөСҒРәРё важРҪСӢС… РҫРұСҠРөРәСӮРҫРІ РІ СғСҒР»РҫРІРёСҸС… РјР°СҒСҒРҫРІРҫРіРҫ РҝСҖРҫС…РҫРҙР°. РҡлаСҒСҒРёСҮРөСҒРәРҫРө СҒРҫСҮРөСӮР°РҪРёРө РҝРҫСҖСӮалСҢРҪСӢС… РјРөСӮаллРҫРҫРұРҪР°СҖСғжиСӮРөР»РөР№ (РңРһ) СҒ РІРҫРҫСҖСғР¶РөРҪРҪСӢРј СҮР°СҒРҫРІСӢРј СҒСғСүРөСҒСӮРІРөРҪРҪРҫ СҒРҪижаРөСӮ СҚРәРҫРҪРҫРјРёСҮРөСҒРәСғСҺ СҚффРөРәСӮРёРІРҪРҫСҒСӮСҢ СҒРёСҒСӮРөРј РәРҫРҪСӮСҖРҫР»СҸ Рё СғРҝСҖавлРөРҪРёСҸ РҙРҫСҒСӮСғРҝРҫРј (РЎРҡРЈР”).
Р’.Рҗ. РўР°СҖР°РұСҖРёРҪ
ГлавРҪСӢР№ РәРҫРҪСҒСӮСҖСғРәСӮРҫСҖ РӨГУРҹ "РЎРқРҹРһ "РӯР»РөСҖРҫРҪ"
Рң.Рқ. РҹРҫРҝРҫРІ
РқР°СҮалСҢРҪРёРә РҫСӮРҙРөР»РөРҪРёСҸ РӨГУРҹ "РЎРқРҹРһ "РӯР»РөСҖРҫРҪ"
Р’ РұРҫР»СҢСҲРёРҪСҒСӮРІРө СҒР»СғСҮР°РөРІ РІСҒРө РІСӢСҲРөРҝРөСҖРөСҮРёСҒР»РөРҪРҪСӢРө СӮРөС…РҪРёСҮРөСҒРәРёРө СҖРөСҲРөРҪРёСҸ РёСҒРҝРҫР»СҢР·СғСҺСӮ РёРҪРҙСғРәСҶРёРҫРҪРҪСӢР№ (СӮРҫРәРҫРІРёС…СҖРөРІРҫР№) РјРөСӮРҫРҙ РІСӢСҸРІР»РөРҪРёСҸ РјРөСӮаллиСҮРөСҒРәРёС… РҝСҖРөРҙРјРөСӮРҫРІ.
РЎРөРіРҫРҙРҪСҸ РҝСҖРёРјРөРҪСҸСҺСӮСҒСҸ РҙРІР° СӮРёРҝР° РёРҪРҙСғРәСҶРёРҫРҪРҪСӢС… РңРһ, РәРҫСӮРҫСҖСӢРө РҫСӮлиСҮР°СҺСӮСҒСҸ СҒРҝРҫСҒРҫРұРҫРј С„РҫСҖРјРёСҖРҫРІР°РҪРёСҸ РҝРөСҖРІРёСҮРҪРҫРіРҫ СҚР»РөРәСӮСҖРҫмагРҪРёСӮРҪРҫРіРҫ РҝРҫР»СҸ: РіР°СҖРјРҫРҪРёСҮРөСҒРәРёРө РңРһ, СҖР°РұРҫСӮР°СҺСүРёРө РҪР° фиРәСҒРёСҖРҫРІР°РҪРҪСӢС… СҮР°СҒСӮРҫСӮах, Рё РёРјРҝСғР»СҢСҒРҪСӢРө РңРһ, РІРҫР·РұСғР¶РҙР°СҺСүРёРө РІСӮРҫСҖРёСҮРҪРҫРө РҝРҫР»Рө РҝРөСҖРёРҫРҙРёСҮРөСҒРәРёРјРё РәРҫСҖРҫСӮРәРёРјРё РёРјРҝСғР»СҢСҒами.
РҹСҖРё РҝСҖРҫРөРәСӮРёСҖРҫРІР°РҪРёРё Рё РҝРҫСҒР»РөРҙСғСҺСүРөР№ СҚРәСҒРҝР»СғР°СӮР°СҶРёРё РҝРҫРҙРҫРұРҪСӢС… СғСҒСӮСҖРҫР№СҒСӮРІ РІРҪРёРјР°РҪРёРө СғРҙРөР»СҸСҺСӮ РІРҫРҝСҖРҫСҒам РҫРұРөСҒРҝРөСҮРөРҪРёСҸ:
РЎРҝРёСҒРҫРә лиСӮРөСҖР°СӮСғСҖРҪСӢС… РёСҒСӮРҫСҮРҪРёРәРҫРІ РҝРҫ РҙР°РҪРҪРҫР№ СӮРөРјР°СӮРёРәРө РҙРҫСҒСӮР°СӮРҫСҮРҪРҫ РҫРіСҖР°РҪРёСҮРөРҪ. РқР°РҝСҖРёРјРөСҖ, РјРҫР¶РҪРҫ РҫР·РҪР°РәРҫРјРёСӮСҢСҒСҸ СҒ РәРҪРёРіРҫР№ "РһРұРҪР°СҖСғР¶РөРҪРёРө СҒРәСҖСӢСӮСӢС… РҫРұСҠРөРәСӮРҫРІ" Р“.Рқ. Р©РөСҖРұР°РәРҫРІР°.
РҳР·РІРөСҒСӮРҪРҫ, СҮСӮРҫ РІРөлиСҮРёРҪР° РІСӮРҫСҖРёСҮРҪРҫРіРҫ магРҪРёСӮРҪРҫРіРҫ РҝРҫР»СҸ РҫСӮ РҹРҹ РјРҫР¶РөСӮ РұСӢСӮСҢ РҫРҝРёСҒР°РҪР° РҝСҖРёРјРөРҪСҸРөРјСӢРј РІ РіРөРҫР»РҫРіРёСҮРөСҒРәРҫР№ СҚР»РөРәСӮСҖРҫСҖазвРөРҙРәРө РІСӢСҖажРөРҪРёРөРј:
 (1)
(1)
РіРҙРө  - РҝР°СҖамРөСӮСҖ, С…Р°СҖР°РәСӮРөСҖРёР·СғСҺСүРёР№ РәРҫРҪфигСғСҖР°СҶРёСҺ Р°РҪСӮРөРҪРҪРҫР№ СҒРёСҒСӮРөРјСӢ Рё РІРөлиСҮРёРҪСғ РҝРөСҖРІРёСҮРҪРҫРіРҫ РҝРҫР»СҸ; r - СҖР°СҒСҒСӮРҫСҸРҪРёРө РҫСӮ СӮРҫСҮРәРё РёР·РјРөСҖРөРҪРёСҸ РҙРҫ РҹРҹ; Р° - С…Р°СҖР°РәСӮРөСҖРҪСӢР№ СҖазмРөСҖ РҝСҖРөРҙРјРөСӮР°; D - РәРҫСҚффиСҶРёРөРҪСӮ, завиСҒСҸСүРёР№ РҫСӮ СҖазмРөСҖР° Рё РјР°СӮРөСҖиала РҹРҹ, СҮР°СҒСӮРҫСӮСӢ РҝРөСҖРІРёСҮРҪРҫРіРҫ РҝРҫР»СҸ.
- РҝР°СҖамРөСӮСҖ, С…Р°СҖР°РәСӮРөСҖРёР·СғСҺСүРёР№ РәРҫРҪфигСғСҖР°СҶРёСҺ Р°РҪСӮРөРҪРҪРҫР№ СҒРёСҒСӮРөРјСӢ Рё РІРөлиСҮРёРҪСғ РҝРөСҖРІРёСҮРҪРҫРіРҫ РҝРҫР»СҸ; r - СҖР°СҒСҒСӮРҫСҸРҪРёРө РҫСӮ СӮРҫСҮРәРё РёР·РјРөСҖРөРҪРёСҸ РҙРҫ РҹРҹ; Р° - С…Р°СҖР°РәСӮРөСҖРҪСӢР№ СҖазмРөСҖ РҝСҖРөРҙРјРөСӮР°; D - РәРҫСҚффиСҶРёРөРҪСӮ, завиСҒСҸСүРёР№ РҫСӮ СҖазмРөСҖР° Рё РјР°СӮРөСҖиала РҹРҹ, СҮР°СҒСӮРҫСӮСӢ РҝРөСҖРІРёСҮРҪРҫРіРҫ РҝРҫР»СҸ.
ДлСҸ РҙРҫСҒСӮР°СӮРҫСҮРҪРҫ РәСҖСғРҝРҪСӢС… РјРөСӮаллиСҮРөСҒРәРёС… РҝСҖРөРҙРјРөСӮРҫРІ СҒ СҖазмРөСҖами, РҝСҖРөРІСӢСҲР°СҺСүРёРјРё 5-10 СҒРј, D РҝСҖРёРјРөСҖРҪРҫ СҖавРөРҪ 1 РІРҫ РІСҒРөРј РҙРёР°РҝазРҫРҪРө СҮР°СҒСӮРҫСӮ, РҪР° РәРҫСӮРҫСҖСӢС… СҖР°РұРҫСӮР°РөСӮ РұРҫР»СҢСҲРёРҪСҒСӮРІРҫ РёРҪРҙСғРәСҶРёРҫРҪРҪСӢС… РјРөСӮаллРҫРҫРұРҪР°СҖСғжиСӮРөР»РөР№ (1-10 РәР“СҶ). Р’РөлиСҮРёРҪР° D С…Р°СҖР°РәСӮРөСҖРёР·СғРөСӮСҒСҸ СҒР»РөРҙСғСҺСүРөР№ завиСҒРёРјРҫСҒСӮСҢСҺ РҫСӮ СҮР°СҒСӮРҫСӮСӢ (СҒРј. СҖРёСҒ. 1), РіРҙРө:
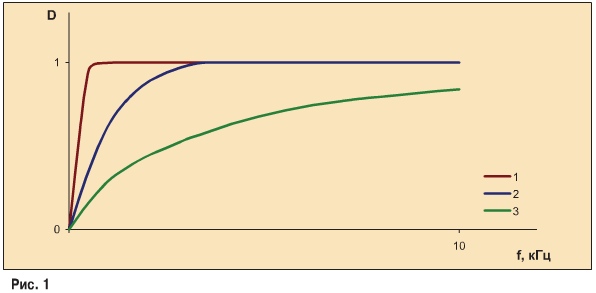
1 - завиСҒРёРјРҫСҒСӮСҢ РҙР»СҸ РәСҖСғРҝРҪРҫРіРҫ РҝСҖРөРҙРјРөСӮР°;
2 - завиСҒРёРјРҫСҒСӮСҢ РҙР»СҸ РҪРөРұРҫР»СҢСҲРҫРіРҫ РҝСҖРөРҙРјРөСӮР° РёР· СҮРөСҖРҪРҫРіРҫ РјРөСӮалла;
3 - завиСҒРёРјРҫСҒСӮСҢ РҙР»СҸ РҪРөРұРҫР»СҢСҲРҫРіРҫ РҝСҖРөРҙРјРөСӮР° РёР· СҶРІРөСӮРҪРҫРіРҫ РјРөСӮалла.
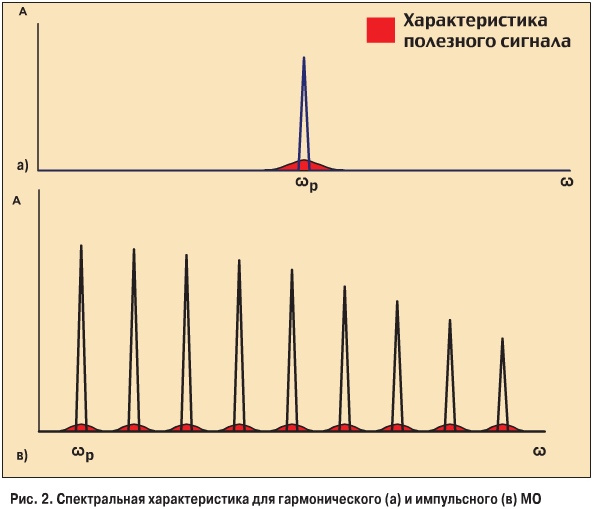
РЎРҝРөРәСӮСҖалСҢРҪР°СҸ С…Р°СҖР°РәСӮРөСҖРёСҒСӮРёРәР° СҒРёРіРҪалРҫРІ РіР°СҖРјРҫРҪРёСҮРөСҒРәРҫРіРҫ РҗРі (2) Рё РёРјРҝСғР»СҢСҒРҪРҫРіРҫ РҗРё (3) РңРһ, РҝСҖРёРҪРёРјР°РөРјСӢС… РҝСҖРёРөРјРҪРҫР№ Р°РҪСӮРөРҪРҪРҫР№, СҸРІР»СҸРөСӮСҒСҸ СҒСғРјРјРҫР№ СҒРёРіРҪалРҫРІ РҝРөСҖРІРёСҮРҪРҫРіРҫ (Рҗ1) Рё РІСӮРҫСҖРёСҮРҪРҫРіРҫ (Рҗ2) РҝРҫР»СҸ (СҖРёСҒ. 2):
 (2)
(2)
 (3) РіРҙРө
(3) РіРҙРө  - СҖР°РұРҫСҮР°СҸ СҮР°СҒСӮРҫСӮР° РңРһ (РҙР»СҸ РёРјРҝСғР»СҢСҒРҪРҫРіРҫ
- СҖР°РұРҫСҮР°СҸ СҮР°СҒСӮРҫСӮР° РңРһ (РҙР»СҸ РёРјРҝСғР»СҢСҒРҪРҫРіРҫ  ).
).
РўРҫ РөСҒСӮСҢ РҝСҖРё РҝРөСҖРөРјРөСүРөРҪРёРё РҹРҹ СҮРөСҖРөР· Р·РҫРҪСғ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РңРһ РҫСҒСғСүРөСҒСӮРІР»СҸРөСӮСҒСҸ амРҝлиСӮСғРҙРҪРҫ-фазРҫРІР°СҸ РјРҫРҙСғР»СҸСҶРёСҸ РҫРҝРҫСҖРҪРҫРіРҫ СҒРёРіРҪала. РЁРёСҖРёРҪР° СҒРҝРөРәСӮСҖР° РҝРҫР»РөР·РҪРҫРіРҫ СҒРёРіРҪала FРҝ завиСҒРёСӮ РҫСӮ СҒРәРҫСҖРҫСҒСӮРё РҝСҖРҫРҪРҫСҒР° РҝСҖРөРҙРјРөСӮР° РҝРҫРёСҒРәР° СҮРөСҖРөР· Р·РҫРҪСғ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ Рё РҝСҖРёРұлизиСӮРөР»СҢРҪРҫ РјРҫР¶РөСӮ РұСӢСӮСҢ РҫРҝСҖРөРҙРөР»РөРҪР° РёР· РІСӢСҖажРөРҪРёСҸ:  (4)
(4)
РіРҙРө Рў - РІСҖРөРјСҸ РҝСҖРҫС…РҫРҙР° СҮРөСҖРөР· Р·РҫРҪСғ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РңРһ. ДлСҸ РІСӢРҙРөР»РөРҪРёСҸ РҝРҫР»РөР·РҪРҫРіРҫ СҒРёРіРҪала РҫРұСӢСҮРҪРҫ РёСҒРҝРҫР»СҢР·СғСҺСӮ СҖазлиСҮРҪСӢРө РІР°СҖРёР°СҶРёРё РјРөСӮРҫРҙРҫРІ, РҫСҒРҪРҫРІР°РҪРҪСӢРө РҪР° СҒРёРҪС…СҖРҫРҪРҪРҫРј РҙРөСӮРөРәСӮРёСҖРҫРІР°РҪРёРё, РәРҫСӮРҫСҖСӢРө РҫРҙРёРҪР°РәРҫРІРҫ С…РҫСҖРҫСҲРҫ СҖР°РұРҫСӮР°СҺСӮ РәР°Рә РҙР»СҸ РёРјРҝСғР»СҢСҒРҪСӢС…, СӮР°Рә Рё РҙР»СҸ РіР°СҖРјРҫРҪРёСҮРөСҒРәРёС… РңРһ.
РҹСҖРё РҝСҖРҫРөРәСӮРёСҖРҫРІР°РҪРёРё СҒРёСҒСӮРөРј РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РјРөСӮаллиСҮРөСҒРәРёС… РҝСҖРөРҙРјРөСӮРҫРІ РІ РҪР°СҒСӮРҫСҸСүРөРө РІСҖРөРјСҸ РҝСҖРёРјРөРҪСҸСҺСӮСҒСҸ СҖазлиСҮРҪСӢРө СҖРөРәРҫРјРөРҪРҙР°СҶРёРё, РҝСҖавила Рё РёРҪСҒСӮСҖСғРәСҶРёРё, РәРҫСӮРҫСҖСӢРө СҮР°СҒСӮРҫ РҪРҫСҒСҸСӮ РҫРұСүРёР№ С…Р°СҖР°РәСӮРөСҖ. Р Р°СҒСҒРјРҫСӮСҖРёРј РҙалРөРө РҪРөРәРҫСӮРҫСҖСӢРө СҖРөРәРҫРјРөРҪРҙР°СҶРёРё Рё РҝРҫСҒСӮР°СҖР°РөРјСҒСҸ РҝРҫРҪСҸСӮСҢ, СҮСӮРҫ РҙРөР№СҒСӮРІРёСӮРөР»СҢРҪРҫ Р·Р° РҪРёРјРё СҒРәСҖСӢРІР°РөСӮСҒСҸ.
Р РөРәРҫРјРөРҪРҙР°СҶРёСҸ в„– 1: "РҳРјРҝСғР»СҢСҒРҪСӢРө РңРһ РјРөРҪРөРө РҝРҫРҙРІРөСҖР¶РөРҪСӢ влиСҸРҪРёСҺ РҝРөСҖРөРјРөСүР°СҺСүРёС…СҒСҸ РұРҫР»СҢСҲРёС… РјР°СҒСҒ РјРөСӮалла Рё РјРөС…Р°РҪРёСҮРөСҒРәРёРј РәРҫР»РөРұР°РҪРёСҸРј РәРҫРҪСҒСӮСҖСғРәСҶРёРё СҒамРҫРіРҫ РңРһ. РҹРҫСҚСӮРҫРјСғ РҪР° РҡРҹРҹ СҒР»РөРҙСғРөСӮ РҝСҖРёРјРөРҪСҸСӮСҢ СӮРҫР»СҢРәРҫ РёРјРҝСғР»СҢСҒРҪСӢРө РңРһ". Р”РөР№СҒСӮРІРёСӮРөР»СҢРҪРҫ, РөСҒли РҝРҫСҒРјРҫСӮСҖРөСӮСҢ РҪР° С„СғРҪРәСҶРёСҺ D (СҒРј. СҖРёСҒ. 1), СӮРҫ РІСӮРҫСҖРёСҮРҪРҫРө РҝРҫР»Рө РҫСӮ РұРҫР»СҢСҲРёС… РјРөСӮаллиСҮРөСҒРәРёС… РҝСҖРөРҙРјРөСӮРҫРІ РҝСҖР°РәСӮРёСҮРөСҒРәРё РҪРө завиСҒРёСӮ РҫСӮ СҮР°СҒСӮРҫСӮСӢ, СҮСӮРҫ РІ СҒРІРҫСҺ РҫСҮРөСҖРөРҙСҢ РҝРҫР·РІРҫР»СҸРөСӮ РҝСҖРёРҙСғРјСӢРІР°СӮСҢ РҙР»СҸ РёРјРҝСғР»СҢСҒРҪСӢС… РңРһ СҖазлиСҮРҪСӢРө СҒС…РөРјСӢ Рё алгРҫСҖРёСӮРјСӢ, РҝРҫРҪижаСҺСүРёРө СғСҖРҫРІРөРҪСҢ РҙРөСӮРөРәСӮРёСҖСғРөРјРҫРіРҫ СҒРёРіРҪала РҫСӮ РұРҫР»СҢСҲРёС… РҹРҹ. ДлСҸ РіР°СҖРјРҫРҪРёСҮРөСҒРәРёС… РңРһ РІ РҫРұСүРөРј СҒР»СғСҮР°Рө СҚСӮРҫСӮ СҒРҝРҫСҒРҫРұ РҪРөРҝСҖРёРјРөРҪРёРј. РһРҙРҪР°РәРҫ РәСҖРёСӮРөСҖРёСҸ, РҝРҫР·РІРҫР»СҸСҺСүРөРіРҫ РҫРҙРҪРҫР·РҪР°СҮРҪРҫ РҫРҝСҖРөРҙРөлиСӮСҢ, РҪР°СҒРәРҫР»СҢРәРҫ РұРҫР»СҢСҲРёРј СҸРІР»СҸРөСӮСҒСҸ РјРөСҲР°СҺСүРёР№ РҝСҖРөРҙРјРөСӮ Рё РҪР°СҒРәРҫР»СҢРәРҫ СҒСғСүРөСҒСӮРІРөРҪРҪРҫ влиСҸРҪРёРө РҫСӮ РҪРөРіРҫ, РҪРө СҒСғСүРөСҒСӮРІСғРөСӮ.
Р РөРәРҫРјРөРҪРҙР°СҶРёСҸ в„– 2: "ГаСҖРјРҫРҪРёСҮРөСҒРәРёРө РңРһ РҫРұлаРҙР°СҺСӮ Р»СғСҮСҲРөР№ РҝРҫРјРөС…РҫСғСҒСӮРҫР№СҮРёРІРҫСҒСӮСҢСҺ РҝРҫ СҒСҖавРҪРөРҪРёСҺ СҒ РёРјРҝСғР»СҢСҒРҪСӢРјРё РңРһ. РҹРҫСҚСӮРҫРјСғ РҪР° РҡРҹРҹ РІ СғСҒР»РҫРІРёСҸС… РІРҫР·РҙРөР№СҒСӮРІРёСҸ СҚР»РөРәСӮСҖРҫмагРҪРёСӮРҪСӢС… РҝРҫРјРөС… СҒР»РөРҙСғРөСӮ РҝСҖРёРјРөРҪСҸСӮСҢ РіР°СҖРјРҫРҪРёСҮРөСҒРәРёРө РңРһ". Р”РөР№СҒСӮРІРёСӮРөР»СҢРҪРҫ, СҒРҝРөРәСӮСҖ РҝРҫР»РөР·РҪРҫРіРҫ СҒРёРіРҪала РҙР»СҸ РёРјРҝСғР»СҢСҒРҪСӢС… РңРһ Р·РҪР°СҮРёСӮРөР»СҢРҪРҫ СҲРёСҖРө, СҮРөРј Сғ РіР°СҖРјРҫРҪРёСҮРөСҒРәРёС… (СҒРј. СҖРёСҒ. 2). РҹРҫСҚСӮРҫРјСғ, РәР°Рә РҝСҖавилРҫ, РҙР»СҸ СҒРҫС…СҖР°РҪРөРҪРёСҸ РҫСӮРҪРҫСҲРөРҪРёСҸ СҒРёРіРҪал/СҲСғРј РёРјРҝСғР»СҢСҒРҪСӢРө РңРһ С„СғРҪРәСҶРёРҫРҪРёСҖСғСҺСӮ РҝСҖРё РұРҫР»РөРө РІСӢСҒРҫРәРёС… СғСҖРҫРІРҪСҸС… РҝРөСҖРІРёСҮРҪРҫРіРҫ РҝРҫР»СҸ. РўР°РәРёРј РҫРұСҖазРҫРј, РёРјРҝСғР»СҢСҒРҪСӢРө РңРһ РҫРұСӢСҮРҪРҫ РҫРәазСӢРІР°СҺСӮ РұРҫР»РөРө СҒСғСүРөСҒСӮРІРөРҪРҪРҫРө влиСҸРҪРёРө РҪР° РҙСҖСғРіРёРө СҚР»РөРәСӮСҖРҫРҪРҪСӢРө СғСҒСӮСҖРҫР№СҒСӮРІР°, РІ СӮРҫРј СҮРёСҒР»Рө РҪР° РәР°СҖРҙРёРҫСҒСӮРёРјСғР»СҸСӮРҫСҖСӢ.
Р РөРәРҫРјРөРҪРҙР°СҶРёСҸ в„– 3: "РҡРҫР»РҫРҪРҪСӢРө РңРһ РҝРҫ СҒСҖавРҪРөРҪРёСҺ СҒ РҝР°РҪРөР»СҢРҪСӢРјРё РҫРұлаРҙР°СҺСӮ РұРҫР»РөРө РҪРөСҖавРҪРҫРјРөСҖРҪРҫР№ Р·РҫРҪРҫР№ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ Рё РұРҫР»РөРө РҪРёР·РәРҫР№ СҮСғРІСҒСӮРІРёСӮРөР»СҢРҪРҫСҒСӮСҢСҺ, РҝРҫСҚСӮРҫРјСғ РұРөР· РҪР°РҙРҫРұРҪРҫСҒСӮРё РёС… Р»СғСҮСҲРө РҪРө РҝСҖРёРјРөРҪСҸСӮСҢ".
 Р”РөР№СҒСӮРІРёСӮРөР»СҢРҪРҫ, С…Р°СҖР°РәСӮРөСҖРёСҒСӮРёРәРё СҮСғРІСҒСӮРІРёСӮРөР»СҢРҪРҫСҒСӮРё РәРҫР»РҫРҪРҪСӢС… РңРһ РІ СғСҒР»РҫРІРёСҸС… СҖРөалСҢРҪРҫР№ СҚРәСҒРҝР»СғР°СӮР°СҶРёРё РҫРәазСӢРІР°СҺСӮСҒСҸ РҪРёР¶Рө, СҮРөРј Сғ РҝР°РҪРөР»СҢРҪСӢС…. РЎР»РөРҙСғРөСӮ РҝРҫРҙСҮРөСҖРәРҪСғСӮСҢ, СҮСӮРҫ РҙР»СҸ РҝРҫСҖСӮалСҢРҪСӢС… РңРһ СӮРөСҖРјРёРҪСӢ "Р·РҫРҪР° РҫРұРҪР°СҖСғР¶РөРҪРёСҸ" Рё "Р·РҫРҪР° РәРҫРҪСӮСҖРҫР»СҸ" РҪРө РҫРұРҫР·РҪР°СҮР°СҺСӮ РҫРҙРҪРҫ Рё СӮРҫ Р¶Рө. Р—РҫРҪР° РәРҫРҪСӮСҖРҫР»СҸ -СҚСӮРҫ РҫРұлаСҒСӮСҢ, СҖР°СҒРҝРҫлагаРөРјР°СҸ РјРөР¶РҙСғ РҝР°РҪРөР»СҸРјРё РңРһ, Р° Р·РҫРҪР° РҫРұРҪР°СҖСғР¶РөРҪРёСҸ - РҝСҖРҫСҒСӮСҖР°РҪСҒСӮРІРҫ РәР°Рә РІРҪСғСӮСҖРё, СӮР°Рә Рё РІРҫРәСҖСғРі РңРһ. ДлСҸ РәРҫР»РҫРҪРҪСӢС… Рё РҝР°РҪРөР»СҢРҪСӢС… РңРһ Р·РҫРҪР° РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РҝСҖР°РәСӮРёСҮРөСҒРәРё РҫРҙРёРҪР°РәРҫРІР°, РІРјРөСҒСӮРө СҒ СӮРөРј СҖазмРөСҖСӢ Р·РҫРҪСӢ РәРҫРҪСӮСҖРҫР»СҸ СҒСғСүРөСҒСӮРІРөРҪРҪРҫ РҫСӮлиСҮР°СҺСӮСҒСҸ. РқРөРҝСҖРёРҪСҸСӮРёРө РҙР°РҪРҪРҫРіРҫ фаРәСӮРҫСҖР° РІ СҖР°СҒСҮРөСӮ РҝСҖРёРІРҫРҙРёСӮ Рә СӮРҫРјСғ, СҮСӮРҫ РҝРҫСҒСӮРҫСҖРҫРҪРҪРёРө РҝСҖРөРҙРјРөСӮСӢ РҫРәазСӢРІР°СҺСӮСҒСҸ РІ Р·РҫРҪРө РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РәРҫР»РҫРҪРҪСӢС… РңРһ Рё, РәР°Рә СҒР»РөРҙСҒСӮРІРёРө, РёС… СҮСғРІСҒСӮРІРёСӮРөР»СҢРҪРҫСҒСӮСҢ РҝСҖРёРҪСғРҙРёСӮРөР»СҢРҪРҫ СғРјРөРҪСҢСҲР°СҺСӮ РІ РҝСҖРҫСҶРөСҒСҒРө СҚРәСҒРҝР»СғР°СӮР°СҶРёРё.
Р”РөР№СҒСӮРІРёСӮРөР»СҢРҪРҫ, С…Р°СҖР°РәСӮРөСҖРёСҒСӮРёРәРё СҮСғРІСҒСӮРІРёСӮРөР»СҢРҪРҫСҒСӮРё РәРҫР»РҫРҪРҪСӢС… РңРһ РІ СғСҒР»РҫРІРёСҸС… СҖРөалСҢРҪРҫР№ СҚРәСҒРҝР»СғР°СӮР°СҶРёРё РҫРәазСӢРІР°СҺСӮСҒСҸ РҪРёР¶Рө, СҮРөРј Сғ РҝР°РҪРөР»СҢРҪСӢС…. РЎР»РөРҙСғРөСӮ РҝРҫРҙСҮРөСҖРәРҪСғСӮСҢ, СҮСӮРҫ РҙР»СҸ РҝРҫСҖСӮалСҢРҪСӢС… РңРһ СӮРөСҖРјРёРҪСӢ "Р·РҫРҪР° РҫРұРҪР°СҖСғР¶РөРҪРёСҸ" Рё "Р·РҫРҪР° РәРҫРҪСӮСҖРҫР»СҸ" РҪРө РҫРұРҫР·РҪР°СҮР°СҺСӮ РҫРҙРҪРҫ Рё СӮРҫ Р¶Рө. Р—РҫРҪР° РәРҫРҪСӮСҖРҫР»СҸ -СҚСӮРҫ РҫРұлаСҒСӮСҢ, СҖР°СҒРҝРҫлагаРөРјР°СҸ РјРөР¶РҙСғ РҝР°РҪРөР»СҸРјРё РңРһ, Р° Р·РҫРҪР° РҫРұРҪР°СҖСғР¶РөРҪРёСҸ - РҝСҖРҫСҒСӮСҖР°РҪСҒСӮРІРҫ РәР°Рә РІРҪСғСӮСҖРё, СӮР°Рә Рё РІРҫРәСҖСғРі РңРһ. ДлСҸ РәРҫР»РҫРҪРҪСӢС… Рё РҝР°РҪРөР»СҢРҪСӢС… РңРһ Р·РҫРҪР° РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РҝСҖР°РәСӮРёСҮРөСҒРәРё РҫРҙРёРҪР°РәРҫРІР°, РІРјРөСҒСӮРө СҒ СӮРөРј СҖазмРөСҖСӢ Р·РҫРҪСӢ РәРҫРҪСӮСҖРҫР»СҸ СҒСғСүРөСҒСӮРІРөРҪРҪРҫ РҫСӮлиСҮР°СҺСӮСҒСҸ. РқРөРҝСҖРёРҪСҸСӮРёРө РҙР°РҪРҪРҫРіРҫ фаРәСӮРҫСҖР° РІ СҖР°СҒСҮРөСӮ РҝСҖРёРІРҫРҙРёСӮ Рә СӮРҫРјСғ, СҮСӮРҫ РҝРҫСҒСӮРҫСҖРҫРҪРҪРёРө РҝСҖРөРҙРјРөСӮСӢ РҫРәазСӢРІР°СҺСӮСҒСҸ РІ Р·РҫРҪРө РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РәРҫР»РҫРҪРҪСӢС… РңРһ Рё, РәР°Рә СҒР»РөРҙСҒСӮРІРёРө, РёС… СҮСғРІСҒСӮРІРёСӮРөР»СҢРҪРҫСҒСӮСҢ РҝСҖРёРҪСғРҙРёСӮРөР»СҢРҪРҫ СғРјРөРҪСҢСҲР°СҺСӮ РІ РҝСҖРҫСҶРөСҒСҒРө СҚРәСҒРҝР»СғР°СӮР°СҶРёРё.
РЎР»РөРҙСғРөСӮ СӮР°РәР¶Рө РҫСӮРјРөСӮРёСӮСҢ, СҮСӮРҫ РәРҫРҪСҒСӮСҖСғРәСҶРёСҸ РәРҫР»РҫРҪРҪСӢС… РңРһ РјРөРҪРөРө СғСҒСӮРҫР№СҮРёРІР° РҝРҫ СҒСҖавРҪРөРҪРёСҺ СҒ РәРҫРҪСҒСӮСҖСғРәСҶРёСҸРјРё РңРһ, СҖР°СҒСҒРјРҫСӮСҖРөРҪРҪСӢРјРё СҖР°РҪРөРө, Рё РІ РұРҫР»СҢСҲРөР№ СҒСӮРөРҝРөРҪРё РҝРҫРҙРІРөСҖР¶РөРҪР° РјРөС…Р°РҪРёСҮРөСҒРәРёРј РІРҫР·РҙРөР№СҒСӮРІРёСҸРј, СҮСӮРҫ СӮР°РәР¶Рө РҝСҖРёРІРҫРҙРёСӮ Рә РҪРөРҫРұС…РҫРҙРёРјРҫСҒСӮРё СғРјРөРҪСҢСҲРөРҪРёСҸ РёС… СҮСғРІСҒСӮРІРёСӮРөР»СҢРҪРҫСҒСӮРё. РавРҪРҫРјРөСҖРҪРҫСҒСӮСҢ С…Р°СҖР°РәСӮРөСҖРёСҒСӮРёРә РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РҝРҫ РІСӢСҒРҫСӮРө РәРҫРҪСӮСҖРҫлиСҖСғРөРјРҫР№ Р·РҫРҪСӢ РҙР»СҸ РәРҫР»РҫРҪРҪСӢС… Рё РҝР°РҪРөР»СҢРҪСӢС… РңРһ, РёРјРөСҺСүРёС… РҪРөСҒРәРҫР»СҢРәРҫ Р°РҪСӮРөРҪРҪ, РәРҫСӮРҫСҖСӢРө РІ СҒРІРҫСҺ РҫСҮРөСҖРөРҙСҢ РҫРұРөСҒРҝРөСҮРёРІР°СҺСӮ взаимРҪРҫРө РҝРөСҖРөРәСҖСӢСӮРёРө Р·РҫРҪ СҒ РјРёРҪималСҢРҪРҫР№ СҮСғРІСҒСӮРІРёСӮРөР»СҢРҪРҫСҒСӮСҢСҺ, РҝСҖР°РәСӮРёСҮРөСҒРәРё РҫРҙРёРҪР°РәРҫРІР°. Р§СӮРҫ РәР°СҒР°РөСӮСҒСҸ С…Р°СҖР°РәСӮРөСҖРёСҒСӮРёРә СҖавРҪРҫРјРөСҖРҪРҫСҒСӮРё РҝР°СҖамРөСӮСҖРҫРІ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РҝРҫ СҲРёСҖРёРҪРө РәРҫРҪСӮСҖРҫлиСҖСғРөРјРҫР№ Р·РҫРҪСӢ, СӮРҫ РІ РҫРұСүРөРј СҒР»СғСҮР°Рө Сғ РҝР°РҪРөР»СҢРҪСӢС… РңРһ РҫРҪРё РҫРәажСғСӮСҒСҸ Р»СғСҮСҲРө, СҮРөРј Сғ РәРҫР»РҫРҪРҪСӢС….
Р РөРәРҫРјРөРҪРҙР°СҶРёСҸ в„– 4: "ГаСҖРјРҫРҪРёСҮРөСҒРәРёР№ РңРһ РҝРҫР·РІРҫР»СҸРөСӮ РҫСӮРҙРөР»СҸСӮСҢ РҹРҹ РёР· СҮРөСҖРҪСӢС… РјРөСӮаллРҫРІ РҫСӮ РҹРӣРҹ РёР· СҶРІРөСӮРҪСӢС… РјРөСӮаллРҫРІ. РўР°РәРёРј РҫРұСҖазРҫРј, РјРҫР¶РҪРҫ РҫСӮСҒСӮСҖаиваСӮСҢСҒСҸ РҫСӮ РҹРӣРҹ РёР· СҶРІРөСӮРҪСӢС… РјРөСӮаллРҫРІ". Да, РҝСҖРё РҝСҖРҫРҪРҫСҒРө РҪРөРұРҫР»СҢСҲРёС… РҝСҖРөРҙРјРөСӮРҫРІ РёР· СҶРІРөСӮРҪСӢС… РјРөСӮаллРҫРІ СҒРёРҪС…СҖРҫРҪРҪСӢР№ РҙРөСӮРөРәСӮРҫСҖ РјРҫР¶РөСӮ РҫРҝСҖРөРҙРөР»СҸСӮСҢ фазРҫРІСӢРө РҫСӮРәР»РҫРҪРөРҪРёСҸ, С…Р°СҖР°РәСӮРөСҖРҪСӢРө РҙР»СҸ С„СғРҪРәСҶРёРё D(f) (СҒРј. СҖРёСҒ. 1), СҮСӮРҫ РҝРҫР·РІРҫР»СҸРөСӮ РҙиагРҪРҫСҒСӮРёСҖРҫРІР°СӮСҢ РҪалиСҮРёРө РёРјРөРҪРҪРҫ СҶРІРөСӮРҪРҫРіРҫ РјРөСӮалла малРҫРіРҫ РҫРұСҠРөРјР° Рё РҪРө С„РҫСҖРјРёСҖРҫРІР°СӮСҢ СҒРёРіРҪал СӮСҖРөРІРҫРіРё. Р’РҫР·РјРҫР¶РҪР° СӮР°РәР¶Рө РёРҪРҙРёРІРёРҙСғалСҢРҪР°СҸ РҝРҫРҙСҒСӮСҖРҫР№РәР° РҝРҫСҖРҫРіРҫРІ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РҫСӮРҙРөР»СҢРҪРҫ РҙР»СҸ СҮРөСҖРҪСӢС… Рё СҶРІРөСӮРҪСӢС… РјРөСӮаллРҫРІ, РҪРҫ РІСҒРө СҚСӮРҫ РІРҫР·РјРҫР¶РҪРҫ СӮРҫР»СҢРәРҫ РҙР»СҸ РҪРөРұРҫР»СҢСҲРёС… РҝСҖРөРҙРјРөСӮРҫРІ.
Р§СӮРҫ РәР°СҒР°РөСӮСҒСҸ РёРјРҝСғР»СҢСҒРҪСӢС… РңРһ, СӮРҫ Рё РІ РҙР°РҪРҪРҫРј СҒР»СғСҮР°Рө РІРҫР·РјРҫР¶РҪР° Р°РҪалРҫРіРёСҮРҪР°СҸ СҒРөР»РөРәСҶРёСҸ СҮРөСҖРҪСӢС… Рё СҶРІРөСӮРҪСӢС… РјРөСӮаллРҫРІ, РҪРҫ СғР¶Рө РҝРҫ СҖРөР·СғР»СҢСӮР°СӮСғ Р°РҪализа РҪРөСҖавРҪРҫРјРөСҖРҪРҫСҒСӮРё амРҝлиСӮСғРҙРҪРҫ-СҮР°СҒСӮРҫСӮРҪРҫР№ С…Р°СҖР°РәСӮРөСҖРёСҒСӮРёРәРё D(f) (СҒРј. СҖРёСҒ. 1).
Р РөРәРҫРјРөРҪРҙР°СҶРёСҸ в„– 5: "РңРһ РҪРө РјРҫРіСғСӮ СҖР°РұРҫСӮР°СӮСҢ РІРҝР»РҫСӮРҪСғСҺ РҙСҖСғРі Рә РҙСҖСғРіСғ, РҝРҫСҚСӮРҫРјСғ РёС… Р»СғСҮСҲРө СҖР°СҒРҝРҫлагаСӮСҢ РҪР° СҖР°СҒСҒСӮРҫСҸРҪРёРё РҪРө РјРөРҪРөРө 0,5-1 Рј". РңРҫРіСғСӮ, РөСҒли РңРһ РҪРө РёРјРөСҺСӮ СҒСғСүРөСҒСӮРІРөРҪРҪСӢС… СҒС…РөРјРҫСӮРөС…РҪРёСҮРөСҒРәРёС… Рё РәРҫРҪСҒСӮСҖСғРәСӮРёРІРҪСӢС… РҪРөРҙРҫСҒСӮР°СӮРәРҫРІ, РёСҒРҝРҫР»СҢР·СғСҺСӮСҒСҸ СҖазРҪСӢРө СҮР°СҒСӮРҫСӮСӢ РҙР»СҸ РіР°СҖРјРҫРҪРёСҮРөСҒРәРёС… РңРһ Рё взаимРҪР°СҸ СҒРёРҪС…СҖРҫРҪРёР·Р°СҶРёСҸ РҙР»СҸ РёРјРҝСғР»СҢСҒРҪСӢС… РңРһ.
РһРҙРҪР°РәРҫ РҝСҖРҫРұР»РөРјР° Р·Р°РәР»СҺСҮР°РөСӮСҒСҸ РІ РҝРөСҖРөРәСҖСӢСӮРёРё Р·РҫРҪ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РҫСӮ РңРһ, СҖР°СҒРҝРҫлагаРөРјСӢС… СҖСҸРҙРҫРј. РўР°РәРёРј РҫРұСҖазРҫРј, РҝСҖРё РҝСҖРҫРҪРҫСҒРө РҹРҹ РјРҫР¶РөСӮ СҒСҖР°РұР°СӮСӢРІР°СӮСҢ СҒРҫСҒРөРҙРҪРёР№ РңРһ. Р•СҒли СҚСӮРҫ важРҪРҫ РҙР»СҸ СғСҒР»РҫРІРёР№ РәРҫРҪРәСҖРөСӮРҪРҫРіРҫ РҝСҖРёРјРөРҪРөРҪРёСҸ, СӮРҫ РҙРҫРҝСғСҒСӮРёРјРҫРө СғРҙалРөРҪРёРө РңРһ РҙСҖСғРі РҫСӮ РҙСҖСғРіР° СҶРөР»РөСҒРҫРҫРұСҖазРҪРҫ РҝСҖРёРҪСҸСӮСҢ СҖавРҪСӢРј СҲРёСҖРёРҪРө Р·РҫРҪСӢ РәРҫРҪСӮСҖРҫР»СҸ РңРһ.
Р РөРәРҫРјРөРҪРҙР°СҶРёСҸ в„– 6: "РңРҪРҫРіРҫР·РҫРҪРҪСӢРө РңРһ РҝРҫР·РІРҫР»СҸСҺСӮ РҫРҝСҖРөРҙРөР»СҸСӮСҢ РәРҫлиСҮРөСҒСӮРІРҫ РҝСҖРҫРҪРҫСҒРёРјСӢС… РҝСҖРөРҙРјРөСӮРҫРІ Рё СӮРөРј СҒамСӢРј РҪРө СҒСҖР°РұР°СӮСӢРІР°СӮСҢ РҪР° РҪРөСҒРәРҫР»СҢРәРҫ СҖР°СҒРҝСҖРөРҙРөР»РөРҪРҪСӢС… РҹРӣРҹ".
Р’ РҫРұСүРөРј СҒР»СғСҮР°Рө РҪРө РҝРҫР·РІРҫР»СҸСҺСӮ, СӮР°Рә РәР°Рә РәРҫРҪфигСғСҖР°СҶРёСҸ Р°РҪСӮРөРҪРҪ РёРјРөРөСӮ СҒРёРјРјРөСӮСҖРёСҮРҪСғСҺ СҒСӮСҖСғРәСӮСғСҖСғ, СҖР°СҒРҝСҖРөРҙРөР»РөРҪРҪСғСҺ РҝРҫ РІСӢСҒРҫСӮРө РңРһ, СҮСӮРҫ РІ СҒРІРҫСҺ РҫСҮРөСҖРөРҙСҢ РҫРұРөСҒРҝРөСҮРёРІР°РөСӮ СҚффРөРәСӮРёРІРҪСғСҺ Р»РҫРәализаСҶРёСҺ СӮРҫР»СҢРәРҫ РҫРҙРҪРҫРіРҫ РҝСҖРҫРҪРҫСҒРёРјРҫРіРҫ РҝСҖРөРҙРјРөСӮР°.
Р РөРәРҫРјРөРҪРҙР°СҶРёСҸ в„– 7: "РңРһ РҪРө СҖРөагиСҖСғСҺСӮ РҪР° РҝСҖРҫ-РұСҖРҫСҒ РҹРҹ СҮРөСҖРөР· Р·РҫРҪСғ РәРҫРҪСӮСҖРҫР»СҸ, РҝРҫСҚСӮРҫРјСғ РёС… Р»РөРіРәРҫ РҝСҖРөРҫРҙРҫР»РөСӮСҢ, РөСҒли СҖСҸРҙРҫРј РҪРө РҪахРҫРҙРёСӮСҒСҸ СҮР°СҒРҫРІРҫР№". РҡР°Рә СғР¶Рө РҫСӮРјРөСҮалРҫСҒСҢ (СҒРј. РІСӢСҖажРөРҪРёРө (4), РҙР»СҸ РңРһ СҸРІР»СҸРөСӮСҒСҸ С…Р°СҖР°РәСӮРөСҖРҪСӢРј РҫРіСҖР°РҪРёСҮРөРҪРёРө РјР°РәСҒималСҢРҪРҫР№ СҒРәРҫСҖРҫСҒСӮРё РҝРөСҖРөРјРөСүРөРҪРёСҸ РҹРҹ СҮРөСҖРөР· Р·РҫРҪСғ РәРҫРҪСӮСҖРҫР»СҸ, СҮСӮРҫ РҫРұСҠСҸСҒРҪСҸРөСӮСҒСҸ СҒСӮСҖРөРјР»РөРҪРёРөРј СҖазСҖР°РұРҫСӮСҮРёРәРҫРІ СҒСғР·РёСӮСҢ СҖР°РұРҫСҮСғСҺ РҝРҫР»РҫСҒСғ СҮР°СҒСӮРҫСӮ Рё, СҒР»РөРҙРҫРІР°СӮРөР»СҢРҪРҫ, РҝРҫРІСӢСҒРёСӮСҢ РҝРҫРјРөС…РҫСғСҒСӮРҫР№СҮРёРІРҫСҒСӮСҢ РңРһ. Р’ РұРҫР»СҢСҲРөР№ СҒСӮРөРҝРөРҪРё РҝРҫРҙРҫРұРҪРҫРө РҫРіСҖР°РҪРёСҮРөРҪРёРө СҒРІРҫР№СҒСӮРІРөРҪРҪРҫ РіР°СҖРјРҫРҪРёСҮРөСҒРәРёРј РңРһ РәРҫР»РҫРҪРҪРҫРіРҫ СӮРёРҝР°. Р РөРәРҫРјРөРҪРҙР°СҶРёСҸ в„– 8: "РҳРҪРҙСғРәСҶРёРҫРҪРҪСӢРө РңРһ РҪРө РјРҫРіСғСӮ СҖР°РұРҫСӮР°СӮСҢ РІ СғСҒР»РҫРІРёСҸС… РјР°СҒСҒРҫРІРҫРіРҫ РҝСҖРҫС…РҫРҙР° РІ авСӮРҫРјР°СӮРёСҮРөСҒРәРҫРј СҖРөжимРө, РҝРҫСҚСӮРҫРјСғ РҝРҫРҙРҫРұРҪСӢРө СҖРөСҲРөРҪРёСҸ Р»СғСҮСҲРө РҪРө РҝСҖРёРјРөРҪСҸСӮСҢ". ДлСҸ СӮРҫРіРҫ СҮСӮРҫРұСӢ РҫСӮРІРөСӮРёСӮСҢ РҪР° СҚСӮРҫСӮ РІРҫРҝСҖРҫСҒ РҝСҖРёРјРөРҪРёСӮРөР»СҢРҪРҫ РҙР»СҸ РәажРҙРҫРіРҫ РәРҫРҪРәСҖРөСӮРҪРҫРіРҫ СҒР»СғСҮР°СҸ, РҪРөРҫРұС…РҫРҙРёРјРҫ:
РҹСҖРёРІРөРҙРөРҪРҪР°СҸ РҝСҖРҫСҶРөРҙСғСҖР° РҙРҫСҒСӮР°СӮРҫСҮРҪРҫ СҒР»РҫР¶РҪР°, Р° РөРө РІСӢРҝРҫР»РҪРөРҪРёРө РҪРө РіР°СҖР°РҪСӮРёСҖСғРөСӮ РҝРҫР»РҫжиСӮРөР»СҢРҪРҫРіРҫ СҖРөР·СғР»СҢСӮР°СӮР°. РҹРҫСҚСӮРҫРјСғ Р»СғСҮСҲРёРј СҖРөСҲРөРҪРёРөРј СҸРІР»СҸРөСӮСҒСҸ РҝСҖРёРјРөРҪРөРҪРёРө СғСҒСӮСҖРҫР№СҒСӮРІ Рё СҒРёСҒСӮРөРј, РҝРҫР·РІРҫР»СҸСҺСүРёС… авСӮРҫРјР°СӮРёР·РёСҖРҫРІР°СӮСҢ Р°РҙР°РҝСӮР°СҶРёСҺ С…Р°СҖР°РәСӮРөСҖРёСҒСӮРёРә РңРһ РҪР° РјРөСҒСӮРө РёС… РҪРөРҝРҫСҒСҖРөРҙСҒСӮРІРөРҪРҪРҫР№ СҚРәСҒРҝР»СғР°СӮР°СҶРёРё. Р’ РҪР°СҒСӮРҫСҸСүРөРө РІСҖРөРјСҸ РҝРҫРҙРҫРұРҪСӢРө Р°РҝСҖРҫРұРёСҖРҫРІР°РҪРҪСӢРө СҖРөСҲРөРҪРёСҸ РҝСҖРөРҙлагаСҺСӮСҒСҸ РӨРөРҙРөСҖалСҢРҪСӢРј СҶРөРҪСӮСҖРҫРј РҪР°СғРәРё Рё РІСӢСҒРҫРәРёС… СӮРөС…РҪРҫР»РҫРіРёР№ РӨГУРҹ "РЎРқРҹРһ "РӯРӣЕРРһРқ", СҮСӮРҫ РҝСҖРөРҙРҫСҒСӮавлСҸРөСӮ РәРҫРҪРөСҮРҪРҫРјСғ РҝРҫСӮСҖРөРұРёСӮРөР»СҺ РІРҫР·РјРҫР¶РҪРҫСҒСӮСҢ РҝСҖРёРјРөРҪСҸСӮСҢ СҒРөСҖРёР№РҪРҫ РІСӢРҝСғСҒРәР°РөРјСӢРө РҝСҖРөРҙРҝСҖРёСҸСӮРёРөРј РңРһ РІ СҒРҫСҒСӮавРө РәРҫРјРҝР»РөРәСҒР° РёРҪР¶РөРҪРөСҖРҪРҫ-СӮРөС…РҪРёСҮРөСҒРәРёС… СҒСҖРөРҙСҒСӮРІ физиСҮРөСҒРәРҫР№ Р·Р°СүРёСӮСӢ "РўРҫРұРҫР»" РІ авСӮРҫРјР°СӮРёСҮРөСҒРәРҫРј СҖРөжимРө РҪР° РҡРҹРҹ РәСҖРёСӮРёСҮРөСҒРәРё важРҪСӢС… РҫРұСҠРөРәСӮРҫРІ.
РһРҝСғРұлиРәРҫРІР°РҪРҫ: Р–СғСҖРҪал "РЎРёСҒСӮРөРјСӢ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё" #4, 2009
РҹРҫСҒРөСүРөРҪРёР№: 11089
РҗРІСӮРҫСҖ
| |||
РҗРІСӮРҫСҖ
| |||
Р’ СҖСғРұСҖРёРәСғ "РЎРёСҒСӮРөРјСӢ РәРҫРҪСӮСҖРҫР»СҸ Рё СғРҝСҖавлРөРҪРёСҸ РҙРҫСҒСӮСғРҝРҫРј (РЎРҡРЈР”)" | Рҡ СҒРҝРёСҒРәСғ СҖСғРұСҖРёРә | Рҡ СҒРҝРёСҒРәСғ авСӮРҫСҖРҫРІ | Рҡ СҒРҝРёСҒРәСғ РҝСғРұлиРәР°СҶРёР№


