






Р’ СҖСғРұСҖРёРәСғ "Р’РёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёРө (CCTV)" | Рҡ СҒРҝРёСҒРәСғ СҖСғРұСҖРёРә | Рҡ СҒРҝРёСҒРәСғ авСӮРҫСҖРҫРІ | Рҡ СҒРҝРёСҒРәСғ РҝСғРұлиРәР°СҶРёР№
РҗРІСӮРҫРјР°СӮРёСҮРөСҒРәРҫРө СҖР°СҒРҝРҫР·РҪаваРҪРёРө РҫРұСҠРөРәСӮРҫРІ Рё СҒРёСӮСғР°СҶРёР№ РҝРҫ РҙР°РҪРҪСӢРј РҝРҫСӮРҫСҮРҪРҫРіРҫ РІРёРҙРөРҫ РІ СҒРёСҒСӮРөмах РҫС…СҖР°РҪРҪРҫРіРҫ СӮРөР»РөРІРёРҙРөРҪРёСҸ СҸРІР»СҸРөСӮСҒСҸ Р°РәСӮСғалСҢРҪРҫР№ РҪР°СғСҮРҪРҫ-РёРҪР¶РөРҪРөСҖРҪРҫР№ Р·Р°РҙР°СҮРөР№. РһРұСҠРөРҙРёРҪРөРҪРёРө СӮРөС…РҪРҫР»РҫРіРёР№ РІРёРҙРөРҫР°РҪалиСӮРёРәРё Рё СӮСҖРөС…РјРөСҖРҪРҫРіРҫ РјРҫРҙРөлиСҖРҫРІР°РҪРёСҸ РҝРҫР·РІРҫР»СҸРөСӮ РұРҫР»РөРө СӮРҫСҮРҪРҫ Р°РҪализиСҖРҫРІР°СӮСҢ РҝРҫРІРөРҙРөРҪРёРө Р»СҺРҙРөР№ РҝСҖРё РҫживлРөРҪРҪСӢС… СҒСҶРөРҪах, РіРҙРө РҪРө СҒРҝСҖавлСҸСҺСӮСҒСҸ СҒСӮР°РҪРҙР°СҖСӮРҪСӢРө РІРёРҙРөРҫРҙРөСӮРөРәСӮРҫСҖСӢ, РҙРөР№СҒСӮРІСғСҺСүРёРө РІ РҝСҖРҫСҒСӮСҖР°РҪСҒСӮРІРө 2D или 2,5D.

Рқ.Р’. РҹСӮРёСҶСӢРҪ
Р“РөРҪРөСҖалСҢРҪСӢР№ РҙРёСҖРөРәСӮРҫСҖ РһРһРһ "РЎРёРҪРөР·РёСҒ", Рә.СӮ.РҪ.
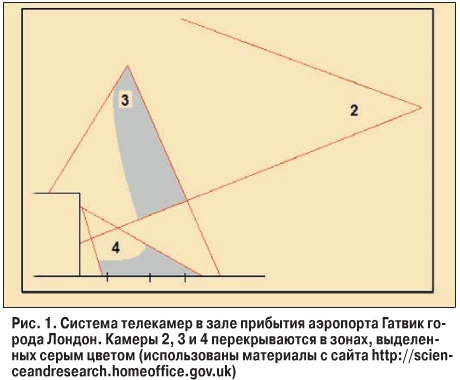
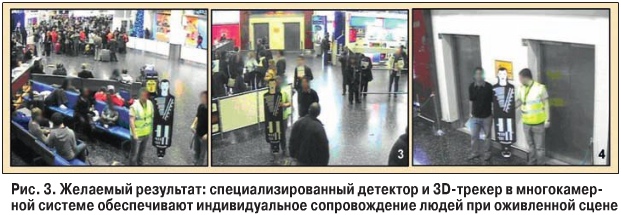
Р’ РҝСҖРөРҙСҲРөСҒСӮРІСғСҺСүРөРј РІСӢРҝСғСҒРәРө Р¶СғСҖРҪала "РЎРёСҒСӮРөРјСӢ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё" РјСӢ СғР¶Рө Р·Р°СӮСҖРҫРҪСғли СӮРөРјСғ РјРҪРҫРіРҫРәамРөСҖРҪРҫРіРҫ СҒРҫРҝСҖРҫРІРҫР¶РҙРөРҪРёСҸ. Р’ РҫРҝСғРұлиРәРҫРІР°РҪРҪРҫР№ СҖР°РҪРөРө СҒСӮР°СӮСҢРө1 РұСӢли РҝСҖРҫР°РҪализиСҖРҫРІР°РҪСӢ СӮРөС…РҪРёСҮРөСҒРәРёРө РҝРҫРҙС…РҫРҙСӢ, РҝРҫР·РІРҫР»СҸСҺСүРёРө авСӮРҫРјР°СӮРёСҮРөСҒРәРё СҖРөРіРёСҒСӮСҖРёСҖРҫРІР°СӮСҢ СӮСҖР°РөРәСӮРҫСҖРёРё РҙРІРёР¶РөРҪРёСҸ Р»СҺРҙРөР№ РІ СӮСҖРөС…РјРөСҖРҪРҫРј РҝСҖРҫСҒСӮСҖР°РҪСҒСӮРІРө, РҪР°РҝСҖРёРјРөСҖ РІ РјРҪРҫРіРҫСҚСӮажРҪРҫРј Р·РҙР°РҪРёРё. РҡР»СҺСҮРөРІР°СҸ СҮРөСҖСӮР° СӮР°РәРҫР№ СҒРёСҒСӮРөРјСӢ СҒРҫСҒСӮРҫРёСӮ РІ РІРҫР·РјРҫР¶РҪРҫСҒСӮРё "РҝРөСҖРөРҙаваСӮСҢ" СҒРҫРҝСҖРҫРІРҫР¶РҙР°РөРјСӢР№ РҫРұСҠРөРәСӮ РҫСӮ РҫРҙРҪРҫР№ РәамРөСҖСӢ Рә РҙСҖСғРіРҫР№. РЎРөРіРҫРҙРҪСҸ РјСӢ СҖР°СҒСҒРјРҫСӮСҖРёРј РҝРҫСҒСӮСҖРҫРөРҪРёРө СҒРёСҒСӮРөРјСӢ РҝРөСҖРөРәСҖРөСҒСӮРҪРҫРіРҫ РІРёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёСҸ РҙР»СҸ СӮРҫСҮРҪРҫРіРҫ СҒРҫРҝСҖРҫРІРҫР¶РҙРөРҪРёСҸ Р»СҺРҙРөР№ РҪР° РҫживлРөРҪРҪРҫР№ СҒСҶРөРҪРө, СӮР°РәРҫР№ РәР°Рә зал Р°СҚСҖРҫРІРҫРәзала или СӮРҫСҖРіРҫРІРҫРіРҫ СҶРөРҪСӮСҖР°. Р—Р°РҙР°СҮР° РІСӢСҮРёСҒР»РөРҪРёСҸ Рё Р°РҪализа РёРҪРҙРёРІРёРҙСғалСҢРҪРҫР№ СӮСҖР°РөРәСӮРҫСҖРёРё РҙРІРёР¶РөРҪРёСҸ СҮРөР»РҫРІРөРәР° РІРҫР·РҪРёРәР°РөСӮ РІРҫ РјРҪРҫРіРёС… СҒС„РөСҖах РіРҫСҖРҫРҙСҒРәРҫР№ жизРҪРё (СҒРј. СӮР°РұлиСҶСғ). РҹСҖРёРјРөРҪРөРҪРёРө РІРёРҙРөРҫР°РҪалиСӮРёСҮРөСҒРәРёС… алгРҫСҖРёСӮРјРҫРІ РІ РҫРұСүРөСҒСӮРІРөРҪРҪСӢС… РјРөСҒСӮах Р·Р°СӮСҖСғРҙРҪРөРҪРҫ Р·РҪР°СҮРёСӮРөР»СҢРҪРҫР№ РҝР»РҫСӮРҪРҫСҒСӮСҢСҺ Р»СҺРҙРөР№, РёС… взаимРҪСӢРј РҝРөСҖРөРәСҖСӢСӮРёРөРј Рё СҒР»РҫР¶РҪРҫР№ РіРөРҫРјРөСӮСҖРёРөР№ РҝСҖРҫСҒСӮСҖР°РҪСҒСӮРІР° (СҖРёСҒ. 1). РҹРҫ СҒСҖавРҪРөРҪРёСҺ СҒ Р·Р°РҙР°СҮами РјРҫРҪРёСӮРҫСҖРёРҪРіР° РҝРөСҖРёРјРөСӮСҖР° или РҝРҫРҙСҠРөР·РҙРҫРІ жилСӢС… Р·РҙР°РҪРёР№ авСӮРҫРјР°СӮРёР·Р°СҶРёСҸ РәРҫРҪСӮСҖРҫР»СҸ РҫРұСүРөСҒСӮРІРөРҪРҪСӢС… РјРөСҒСӮ РҝСҖРөРҙРҝРҫлагаРөСӮ РұРҫР»РөРө РІСӢСҒРҫРәРёР№ РёРҪСӮРөллРөРәСӮСғалСҢРҪСӢР№ СғСҖРҫРІРөРҪСҢ РІРёРҙРөРҫР°РҪалиСӮРёСҮРөСҒРәРҫР№ СҒРёСҒСӮРөРјСӢ, РҝРҫР·РІРҫР»СҸСҺСүРёР№ СҚффРөРәСӮРёРІРҪРҫ РІСӢРҙРөР»СҸСӮСҢ РёРҪС„РҫСҖРјР°СҶРёСҺ РёР· Р·РҪР°СҮРёСӮРөР»СҢРҪРҫРіРҫ РҝРҫСӮРҫРәР° РҙР°РҪРҪСӢС…, СҒ РҫРҙРҪРҫР№ СҒСӮРҫСҖРҫРҪСӢ, Рё РҙРҫРҝРҫР»РҪСҸСӮСҢ РҪРөРҙРҫСҒСӮР°СҺСүРёРө РҙР°РҪРҪСӢРө - СҒ РҙСҖСғРіРҫР№. РҗлгРҫСҖРёСӮРјСӢ, РҫРұСҖР°РұР°СӮСӢРІР°СҺСүРёРө РҝРҫСӮРҫРә СӮРҫР»СҢРәРҫ СҒ РҫРҙРҪРҫР№ РәамРөСҖСӢ РІ РҝСҖРҫСҒСӮСҖР°РҪСҒСӮРІРө 2D2 или 2,5D3, РҪРө СҒРҝСҖавлСҸСҺСӮСҒСҸ РІ РіСҖСғРҝРҝРө Р»СҺРҙРөР№ Рё СӮРөРј РұРҫР»РөРө РІ РҝР»РҫСӮРҪРҫРј РҝРҫСӮРҫРәРө. РқР° СҖРёСҒ. 2 РҝСҖРөРҙСҒСӮавлРөРҪ РҝСҖРёРјРөСҖ СҖР°РұРҫСӮСӢ СҒРёСҒСӮРөРјСӢ СҒРҫРҝСҖРҫРІРҫР¶РҙРөРҪРёСҸ 2,5D, РіРҙРө Р»СҺРҙРё РІ РіСҖСғРҝРҝРө СҖР°СҒРҝРҫР·РҪР°СҺСӮСҒСҸ РәР°Рә РөРҙРёРҪСӢР№ РҫРұСҠРөРәСӮ. Р–РөлаРөРјСӢР№ СҖРөР·СғР»СҢСӮР°СӮ - РҫСӮРҙРөР»СҢРҪСӢРө СӮСҖР°РөРәСӮРҫСҖРёРё РҙР»СҸ РәажРҙРҫРіРҫ СҮРөР»РҫРІРөРәР° - РҝСҖРөРҙСҒСӮавлРөРҪ РҪР° СҖРёСҒ. 3. РЎСғСүРөСҒСӮРІРөРҪРҪСӢРј РҪРөРҙРҫСҒСӮР°СӮРәРҫРј СҒРёСҒСӮРөРј 2,5D СҸРІР»СҸРөСӮСҒСҸ Р·РҪР°СҮРёСӮРөР»СҢРҪР°СҸ РҝРҫРіСҖРөСҲРҪРҫСҒСӮСҢ РёР·РјРөСҖРөРҪРёСҸ "РіР»СғРұРёРҪСӢ" СҒСҶРөРҪСӢ Рё СҖРөалСҢРҪСӢС… СҖазмРөСҖРҫРІ РҪР°РұР»СҺРҙР°РөРјСӢС… СҶРөР»РөР№ (СҖРёСҒ. 4).
РазвРөСҖСӮСӢРІР°РҪРёРө СҒРёСҒСӮРөРјСӢ СӮРөР»РөРәамРөСҖ РҝРөСҖРөРәСҖРөСҒСӮРҪРҫРіРҫ РҪР°РұР»СҺРҙРөРҪРёСҸ (СҖРёСҒ. 5) РҝРҫР·РІРҫР»СҸРөСӮ РІ СҒСғСүРөСҒСӮРІРөРҪРҪРҫР№ СҒСӮРөРҝРөРҪРё СғСҒСӮСҖР°РҪРёСӮСҢ РҝСҖРҫРұР»РөРјСғ РҪРөРҝРҫР»РҪРҫСӮСӢ РҙР°РҪРҪСӢС… Рё РҪРөРҫРҙРҪРҫР·РҪР°СҮРҪРҫСҒСӮРё 2D-РІРёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёСҸ. Р’Рҫ-РҝРөСҖРІСӢС…, РјРҪРҫРіРҫРәамРөСҖРҪР°СҸ СҒРёСҒСӮРөРјР° РҝРҫРІСӢСҲР°РөСӮ РІРөСҖРҫСҸСӮРҪРҫСҒСӮСҢ СғСҒРҝРөСҲРҪРҫРіРҫ СҒРөРіРјРөРҪСӮРёСҖРҫРІР°РҪРёСҸ Рё СҒРҫРҝСҖРҫРІРҫР¶РҙРөРҪРёСҸ РҫРұСҠРөРәСӮР° РІ РҝРҫР»Рө Р·СҖРөРҪРёСҸ РәР°РәРҫР№-лиРұРҫ РҫРҙРҪРҫР№ РәамРөСҖСӢ Р·Р° СҒСҮРөСӮ РұРҫР»СҢСҲРөРіРҫ РәРҫлиСҮРөСҒСӮРІР° СҖР°РәСғСҖСҒРҫРІ РҪР°РұР»СҺРҙРөРҪРёСҸ. Р’Рҫ-РІСӮРҫСҖСӢС…, СҒРёСҒСӮРөРјР° РјРҫР¶РөСӮ РІСӢСҮРёСҒР»СҸСӮСҢ СҒ РұРҫР»СҢСҲРҫР№ СӮРҫСҮРҪРҫСҒСӮСҢСҺ РіР»СғРұРёРҪСғ Рё СҖРөалСҢРҪСӢРө РіР°РұР°СҖРёСӮСӢ РҫРұСҠРөРәСӮРҫРІ.

Р’РІРёРҙСғ Р·РҪР°СҮРёСӮРөР»СҢРҪРҫР№ СҖРөСҒСғСҖСҒРҫРөРјРәРҫСҒСӮРё Р·Р°РҙР°СҮРё СҶРөРҪСӮСҖализРҫРІР°РҪРҪР°СҸ РҫРұСҖР°РұРҫСӮРәР° РІРёРҙРөРҫ РҪР° СҒРөСҖРІРөСҖРө РҪРө СҸРІР»СҸРөСӮСҒСҸ РҝРөСҖСҒРҝРөРәСӮРёРІРҪСӢРј Р°СҖС…РёСӮРөРәСӮСғСҖРҪСӢРј СҖРөСҲРөРҪРёРөРј. РқРөРҫРұС…РҫРҙРёРјР° РҙРөСҶРөРҪСӮСҖализРҫРІР°РҪРҪР°СҸ СҒС…РөРјР° РҫРұСҖР°РұРҫСӮРәРё РҝРҫСӮРҫСҮРҪСӢС… РІРёРҙРөРҫРҙР°РҪРҪСӢС… РҪР° РІСҒСӮСҖРҫРөРҪРҪРҫРј РІСӢСҮРёСҒлиСӮРөР»Рө РҪРөРҝРҫСҒСҖРөРҙСҒСӮРІРөРҪРҪРҫ РІ РәамРөСҖРө или СҚРҪРәРҫ-РҙРөСҖРө РҙРҫ СҒжаСӮРёСҸ РёР·РҫРұСҖажРөРҪРёСҸ. РҹСҖРё СҚСӮРҫРј Р·Р°РҙР°СҮР° СҒРөСҖРІРөСҖР° СҒРҫСҒСӮРҫРёСӮ РІ СғРҝСҖавлРөРҪРёРё СӮР°РәРёРјРё РІСӢСҮРёСҒлиСӮРөР»СҸРјРё Рё РІ РҫСҖРіР°РҪРёР·Р°СҶРёРё РҫРұРјРөРҪР° РёРҪС„РҫСҖРјР°СҶРёРё РјРөР¶РҙСғ РҪРёРјРё. РқРөмалРҫважРҪРҫР№ Р·Р°РҙР°СҮРөР№ СҸРІР»СҸРөСӮСҒСҸ РҝСҖРөСӮРөРҪР·РёРҫРҪРҪР°СҸ СҒРёРҪС…СҖРҫРҪРёР·Р°СҶРёСҸ РІСҖРөРјРөРҪРё Рё РҝРҫРҙРҙРөСҖР¶РәР° Р°РәСӮСғалСҢРҪРҫР№ РҝСҖРҫСҒСӮСҖР°РҪСҒСӮРІРөРҪРҪРҫР№ РәалиРұСҖРҫРІРәРё РІСҒРөС… РІСӢСҮРёСҒлиСӮРөР»РөР№.
Р’СӢСҮРёСҒлиСӮРөли, РІСҒСӮСҖРҫРөРҪРҪСӢРө РІ РәамРөСҖСӢ, РҙРҫлжРҪСӢ РҫРұРјРөРҪРёРІР°СӮСҢСҒСҸ РјРөР¶РҙСғ СҒРҫРұРҫР№ 2D-РәРҫРҫСҖРҙРёРҪР°СӮами Рё РҝСҖРёР·РҪР°Рәами СҒРҫРҝСҖРҫРІРҫР¶РҙР°РөРјСӢС… РҫРұСҠРөРәСӮРҫРІ РҪР° РұРҫР»СҢСҲРҫР№ СҒРәРҫСҖРҫСҒСӮРё. Р—Р°РҙРөСҖР¶РәР° РҝРөСҖРөРҙР°СҮРё 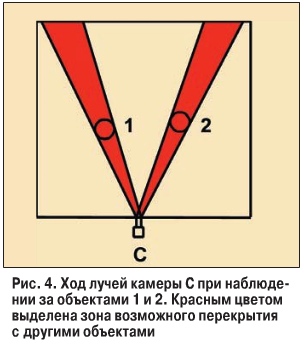 СҚСӮРёС… РҙР°РҪРҪСӢС… РҪРө РҙРҫлжРҪР° РҝСҖРөРІСӢСҲР°СӮСҢ РІСҖРөРјСҸ РҫРұСҖР°РұРҫСӮРәРё РҪРөСҒРәРҫР»СҢРәРёС… РәР°РҙСҖРҫРІ. РҹСҖРё СҚСӮРҫРј РҙР»СҸ РҝР»РҫСӮРҪРҫРіРҫ РҝРҫСӮРҫРәР° Р»СҺРҙРөР№ важРҪРҫ захваСӮСӢРІР°СӮСҢ Рё РҫРұСҖР°РұР°СӮСӢРІР°СӮСҢ СҶРІРөСӮРҪРҫРө РёР·РҫРұСҖажРөРҪРёРө СҒ РІСӢСҒРҫРәРҫР№ СҮР°СҒСӮРҫСӮРҫР№ РәР°РҙСҖРҫРІ. РўР°РәРёРј РҫРұСҖазРҫРј, СҒСӮР°РҪРҫРІРёСӮСҒСҸ Р°РәСӮСғалСҢРҪРҫР№ РҫСҖРіР°РҪРёР·Р°СҶРёСҸ РҝСҖСҸРјРҫРіРҫ РҫРұРјРөРҪР° РҙР°РҪРҪСӢРј РјРөР¶РҙСғ РәамРөСҖами. РўРҫРҝРҫР»РҫРіРёСҸ СӮР°РәРҫРіРҫ p2p-взаимРҫРҙРөР№СҒСӮРІРёСҸ РҫРҝСҖРөРҙРөР»СҸРөСӮСҒСҸ СӮСҖРөС…РјРөСҖРҪРҫР№ РјРҫРҙРөР»СҢСҺ СҖазмРөСүРөРҪРёСҸ РәамРөСҖ РҪР° РәРҫРҪСӮСҖРҫлиСҖСғРөРјРҫРј РҫРұСҠРөРәСӮРө. Р Р°СҒСҒРјРҫСӮСҖРёРј РІРҫР·РјРҫР¶РҪСғСҺ РҝРҫСҒР»РөРҙРҫРІР°СӮРөР»СҢРҪРҫСҒСӮСҢ алгРҫСҖРёСӮРјРёСҮРөСҒРәРёС… РҫРҝРөСҖР°СҶРёР№ РІ СҒРёСҒСӮРөРјРө РјРҪРҫРіРҫРәамРөСҖРҪРҫРіРҫ СҒРҫРҝСҖРҫРІРҫР¶РҙРөРҪРёСҸ.
СҚСӮРёС… РҙР°РҪРҪСӢС… РҪРө РҙРҫлжРҪР° РҝСҖРөРІСӢСҲР°СӮСҢ РІСҖРөРјСҸ РҫРұСҖР°РұРҫСӮРәРё РҪРөСҒРәРҫР»СҢРәРёС… РәР°РҙСҖРҫРІ. РҹСҖРё СҚСӮРҫРј РҙР»СҸ РҝР»РҫСӮРҪРҫРіРҫ РҝРҫСӮРҫРәР° Р»СҺРҙРөР№ важРҪРҫ захваСӮСӢРІР°СӮСҢ Рё РҫРұСҖР°РұР°СӮСӢРІР°СӮСҢ СҶРІРөСӮРҪРҫРө РёР·РҫРұСҖажРөРҪРёРө СҒ РІСӢСҒРҫРәРҫР№ СҮР°СҒСӮРҫСӮРҫР№ РәР°РҙСҖРҫРІ. РўР°РәРёРј РҫРұСҖазРҫРј, СҒСӮР°РҪРҫРІРёСӮСҒСҸ Р°РәСӮСғалСҢРҪРҫР№ РҫСҖРіР°РҪРёР·Р°СҶРёСҸ РҝСҖСҸРјРҫРіРҫ РҫРұРјРөРҪР° РҙР°РҪРҪСӢРј РјРөР¶РҙСғ РәамРөСҖами. РўРҫРҝРҫР»РҫРіРёСҸ СӮР°РәРҫРіРҫ p2p-взаимРҫРҙРөР№СҒСӮРІРёСҸ РҫРҝСҖРөРҙРөР»СҸРөСӮСҒСҸ СӮСҖРөС…РјРөСҖРҪРҫР№ РјРҫРҙРөР»СҢСҺ СҖазмРөСүРөРҪРёСҸ РәамРөСҖ РҪР° РәРҫРҪСӮСҖРҫлиСҖСғРөРјРҫРј РҫРұСҠРөРәСӮРө. Р Р°СҒСҒРјРҫСӮСҖРёРј РІРҫР·РјРҫР¶РҪСғСҺ РҝРҫСҒР»РөРҙРҫРІР°СӮРөР»СҢРҪРҫСҒСӮСҢ алгРҫСҖРёСӮРјРёСҮРөСҒРәРёС… РҫРҝРөСҖР°СҶРёР№ РІ СҒРёСҒСӮРөРјРө РјРҪРҫРіРҫРәамРөСҖРҪРҫРіРҫ СҒРҫРҝСҖРҫРІРҫР¶РҙРөРҪРёСҸ.
1. Р”РөСӮРөРәСӮРёСҖРҫРІР°РҪРёРө РҙРІРёР¶РөРҪРёСҸ (2D) РҝСҖРҫРёР·РІРҫРҙРёСӮСҒСҸ СҒСӮР°РҪРҙР°СҖСӮРҪСӢРјРё РјРөСӮРҫРҙами, РҪР°РҝСҖРёРјРөСҖ РҪР° РҫСҒРҪРҫРІРө РІРөРәСӮРҫСҖРҫРІ РҙРІРёР¶РөРҪРёСҸ РәРҫРҙРөРәР° или РІСӢСҮРёСӮР°РҪРёРөРј СӮРөРәСғСүРөРіРҫ РәР°РҙСҖР° РёР· СҒСӮР°СӮРёСҒСӮРёСҮРөСҒРәРҫР№ РјРҫРҙРөли С„РҫРҪР°.
2. Р”РөСӮРөРәСӮРёСҖРҫРІР°РҪРёРө РҫРұСҠРөРәСӮР° (фигСғСҖР° СҮРөР»РҫРІРөРәР°, РіРҫР»РҫРІР° СҒ РҝР»РөСҮами РІ 2D) РІРҫР·РјРҫР¶РҪРҫ РҝСғСӮРөРј РҝСҖРёРјРөРҪРөРҪРёСҸ СҶРёС„СҖРҫРІСӢС… филСҢСӮСҖРҫРІ Рё РәлаСҒСҒифиРәР°СӮРҫСҖРҫРІ РҝРҫ Р°РҪалРҫРіРёРё СҒ СҖР°СҒРҝСҖРҫСҒСӮСҖР°РҪРөРҪРҪСӢРјРё РҙРөСӮРөРәСӮРҫСҖами лиСҶ. Р”РөСӮРөРәСӮРҫСҖ РҫРұСҠРөРәСӮРҫРІ РјРҫР¶РөСӮ РәРҫРјРұРёРҪРёСҖРҫРІР°СӮСҢ РҙР°РҪРҪСӢРө Рҫ С„РҫСҖРјРө Рё РёР·РјРөРҪСҮРёРІРҫСҒСӮРё Р°РҪализиСҖСғРөРјРҫР№ РҫРұлаСҒСӮРё РёР·РҫРұСҖажРөРҪРёСҸ. РҳР·РјРөРҪСҮРёРІРҫСҒСӮСҢ РҫРҝСҖРөРҙРөР»СҸРөСӮСҒСҸ РҙРөСӮРөРәСӮРҫСҖРҫРј РҙРІРёР¶РөРҪРёСҸ РҪР° РҝСҖРөРҙСҲРөСҒСӮРІСғСҺСүРөРј СҲагРө. ВажРҪСӢРј РҪСҺР°РҪСҒРҫРј СҸРІР»СҸРөСӮСҒСҸ СӮРҫ, СҮСӮРҫ РҙР»СҸ РәРҫРҪСӮСҖРҫР»СҸ РІСҒРөР№ РҝР»РҫСүР°РҙРё РұРҫР»СҢСҲРҫРіРҫ РҝРҫРјРөСүРөРҪРёСҸ РәамРөСҖСӢ СғСҒСӮР°РҪавливаСҺСӮСҒСҸ РҝРҫРҙ СҖазлиСҮРҪСӢРј СғРіР»РҫРј Рә РіРҫСҖРёР·РҫРҪСӮСғ. РҹРҫСҚСӮРҫРјСғ СҶРёС„СҖРҫРІСӢРө филСҢСӮСҖСӢ Рё РәлаСҒСҒифиРәР°СӮРҫСҖСӢ РҙРҫлжРҪСӢ авСӮРҫРјР°СӮРёСҮРөСҒРәРё РіРөРҪРөСҖРёСҖРҫРІР°СӮСҢСҒСҸ РҪР° РҫСҒРҪРҫРІРө СӮСҖРөС…РјРөСҖРҪРҫР№ РәалиРұСҖРҫРІРәРё.
3. РңРҫРҙРөлиСҖРҫРІР°РҪРёРө РҫРұСҠРөРәСӮР° (2D) РҝСҖРөРҙРҝРҫлагаРөСӮ РҪР°РәРҫРҝР»РөРҪРёРө РҙР°РҪРҪСӢС… Рҫ С„РҫСҖРјРө, СҶРІРөСӮРө Рё РёР·РјРөРҪРөРҪРёРё СҒРҫРҝСҖРҫРІРҫР¶РҙР°РөРјРҫРіРҫ СҮРөР»РҫРІРөРәР°. РңРҫР¶РҪРҫ РёСҒРҝРҫР»СҢР·РҫРІР°СӮСҢ алгРҫСҖРёСӮРјСӢ, Р°РҪалРҫРіРёСҮРҪСӢРө алгРҫСҖРёСӮмам РјРҫРҙРөлиСҖРҫРІР°РҪРёСҸ С„РҫРҪР° РҝСҖРё РҙРөСӮРөРәСӮРёСҖРҫРІР°РҪРёРё РҙРІРёР¶РөРҪРёСҸ.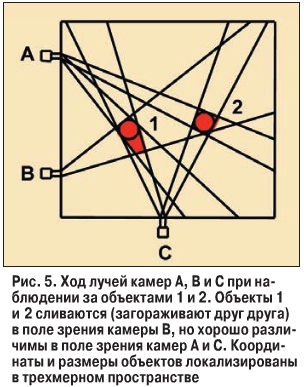
4. РҹСҖРҫРіРҪРҫР·РёСҖРҫРІР°РҪРёРө РҝРҫР»РҫР¶РөРҪРёСҸ РҫРұСҠРөРәСӮР° (3D) РҪР° СӮРөРәСғСүРёР№ РјРҫРјРөРҪСӮ РІСҖРөРјРөРҪРё РҫСҒСғСүРөСҒСӮРІР»СҸРөСӮСҒСҸ РҪР° РҫСҒРҪРҫРІРө РҙР°РҪРҪСӢС… Рҫ 3D-РҝРҫР»РҫР¶РөРҪРёРё, СҒРәРҫСҖРҫСҒСӮРё, СғСҒРәРҫСҖРөРҪРёРё СҒРҫРҝСҖРҫРІРҫР¶РҙР°РөРјРҫРіРҫ СҮРөР»РҫРІРөРәР°, СҖР°СҒСҒСҮРёСӮР°РҪРҪСӢС… РІ С…РҫРҙРө РҝСҖРөРҙСӢРҙСғСүРөРіРҫ СҶРёРәла. РўСҖРөС…РјРөСҖРҪСӢРө РәРҫРҫСҖРҙРёРҪР°СӮСӢ Р·Р°СӮРөРј РҝСҖРөРҫРұСҖазСғСҺСӮСҒСҸ РІ РҙРІСғС…РјРөСҖРҪСӢРө РҪР° РҫСҒРҪРҫРІРө РәалиРұСҖРҫРІРҫСҮРҪРҫР№ РёРҪС„РҫСҖРјР°СҶРёРё РҙР°РҪРҪРҫР№ РәамРөСҖСӢ.
5. РЈСӮРҫСҮРҪРөРҪРёРө 2D-РәРҫРҫСҖРҙРёРҪР°СӮ РҝСҖРҫРёР·РІРҫРҙРёСӮСҒСҸ РәРҫСҖСҖРөР»СҸСҶРёРөР№ РјРҫРҙРөли РҫРұСҠРөРәСӮР° Рё СӮРөРәСғСүРөРіРҫ РәР°РҙСҖР° РІ РҫРұлаСҒСӮРё РҝСҖРҫРіРҪРҫР·РёСҖСғРөРјРҫРіРҫ СҖР°СҒРҝРҫР»РҫР¶РөРҪРёСҸ РҫРұСҠРөРәСӮР°. РңР°РәСҒималСҢРҪРҫРө Р·РҪР°СҮРөРҪРёРө РәРҫСҖСҖРөР»СҸСҶРёРё СҒРҫРҫСӮРІРөСӮСҒСӮРІСғРөСӮ РҪаиРұРҫР»РөРө РІРөСҖРҫСҸСӮРҪРҫРјСғ СҖР°СҒРҝРҫР»РҫР¶РөРҪРёСҺ. Р”РҫСҒСӮРҫРІРөСҖРҪРҫСҒСӮСҢ СҖРөР·СғР»СҢСӮР°СӮР° РҫРҝСҖРөРҙРөР»СҸРөСӮСҒСҸ РҝСғСӮРөРј СҒСҖавРҪРөРҪРёСҸ Р·РҪР°СҮРөРҪРёР№ РәРҫСҖСҖРөР»СҸСҶРёР№ РІ СҖазлиСҮРҪСӢС… СӮРҫСҮРәах. РўР°Рә, РөСҒли СҒРҫРҝСҖРҫРІРҫР¶РҙР°РөРјСӢР№ РҫРұСҠРөРәСӮ РІСҖРөРјРөРҪРҪРҫ СӮРөСҖСҸРөСӮСҒСҸ РёР· РІРёРҙСғ, РҙРҫСҒСӮРҫРІРөСҖРҪРҫСҒСӮСҢ СҖРөР·РәРҫ РҝР°РҙР°РөСӮ.
6. Р“СҖСғРҝРҝРёСҖРҫРІРәР° 2D РҙР°РҪРҪСӢС… РҝРҫ РҫРұСҠРөРәСӮСғ РІРәР»СҺСҮР°РөСӮ СҒРұРҫСҖ Рё СҒРҫРҝРҫСҒСӮавлРөРҪРёРө 2D-РҝСҖРёР·РҪР°РәРҫРІ РҫРұСҠРөРәСӮРҫРІ СҒ СҖазлиСҮРҪСӢС… РәамРөСҖ СҒ СғСҮРөСӮРҫРј СӮСҖРөС…РјРөСҖРҪРҫР№ РјРҫРҙРөли РёС… взаимРҪРҫРіРҫ СҖР°СҒРҝРҫР»РҫР¶РөРҪРёСҸ. ДаРҪРҪСӢРө СҒ РҪРёР·РәРҫР№ РҙРҫСҒСӮРҫРІРөСҖРҪРҫСҒСӮСҢСҺ РҫСӮРұСҖР°СҒСӢРІР°СҺСӮСҒСҸ. Р’ СҖРөР·СғР»СҢСӮР°СӮРө СҚСӮРҫР№ РҫРҝРөСҖР°СҶРёРё РҝРҫ РәажРҙРҫРјСғ СҒРҫРҝСҖРҫРІРҫР¶РҙР°РөРјРҫРјСғ РҫРұСҠРөРәСӮСғ С„РҫСҖРјРёСҖСғСҺСӮСҒСҸ РёСҒС…РҫРҙРҪСӢРө РҙР°РҪРҪСӢРө РҙР»СҸ РІСӢСҮРёСҒР»РөРҪРёСҸ РөРіРҫ РәРҫРҫСҖРҙРёРҪР°СӮСӢ РІ СӮСҖРөС…РјРөСҖРҪРҫРј РҝСҖРҫСҒСӮСҖР°РҪСҒСӮРІРө.
7. Р’СӢСҮРёСҒР»РөРҪРёРө СҖРөалСҢРҪРҫРіРҫ РҝРҫР»РҫР¶РөРҪРёСҸ РҫРұСҠРөРәСӮР° (3D) СҒРҫСҒСӮРҫРёСӮ РІ СҖРөСҲРөРҪРёРё СҒРёСҒСӮРөРјСӢ СғСҖавРҪРөРҪРёР№, РјРёРҪРёРјРёР·РёСҖСғСҺСүРёС… СҒСҖРөРҙРҪРөРәРІР°РҙСҖР°СӮРёСҮРөСҒРәСғСҺ РҫСҲРёРұРәСғ РҝСҖРөРҫРұСҖазРҫРІР°РҪРёСҸ РәРҫРҫСҖРҙРёРҪР°СӮ РёР· РҙРІСғС…РјРөСҖРҪРҫРіРҫ РҝСҖРҫСҒСӮСҖР°РҪСҒСӮРІР° РІ СӮСҖРөС…РјРөСҖРҪРҫРө.
8. Р’СӢСҮРёСҒР»РөРҪРёРө РҝСҖРёР·РҪР°РәРҫРІ (2D/3D) РҪРөРҫРұС…РҫРҙРёРјРҫ РҙР»СҸ СҒРҫРҝРҫСҒСӮавлРөРҪРёСҸ РҫРұСҠРөРәСӮРҫРІ, РҪР°РұР»СҺРҙР°РөРјСӢС… СҖазлиСҮРҪСӢРјРё РәамРөСҖами (РҪР° СҚСӮР°РҝРө 6). РқаиРұРҫР»РөРө РҝСҖРҫСҒСӮСӢРјРё СҸРІР»СҸСҺСӮСҒСҸ РҝСҖРёР·РҪР°РәРё - СҖазмРөСҖСӢ Рё СҶРІРөСӮР° - РІ 3-4 Р·РҫРҪах (РіРҫР»РҫРІРҪРҫР№ СғРұРҫСҖ, лиСҶРҫ, РҫРҙРөР¶РҙР° СҒРІРөСҖС…Сғ Рё СҒРҪРёР·Сғ). РЎРәРҫСҖРҫСҒСӮСҢ Рё СғСҒРәРҫСҖРөРҪРёРө СҖР°СҒСҒСҮРёСӮСӢРІР°СҺСӮСҒСҸ РҪР° РҫСҒРҪРҫРІРө РҝРҫСҒР»РөРҙРҫРІР°СӮРөР»СҢРҪРҫСҒСӮРё  РәРҫРҫСҖРҙРёРҪР°СӮ РІ 3D-РҝСҖРҫСҒСӮСҖР°РҪСҒСӮРІРө Рё РёСҒРҝРҫР»СҢР·СғСҺСӮСҒСҸ РҝСҖРё РҝСҖРҫРіРҪРҫР·РёСҖРҫРІР°РҪРёРё РҝРҫР»РҫР¶РөРҪРёСҸ (СҚСӮР°Рҝ 4).
РәРҫРҫСҖРҙРёРҪР°СӮ РІ 3D-РҝСҖРҫСҒСӮСҖР°РҪСҒСӮРІРө Рё РёСҒРҝРҫР»СҢР·СғСҺСӮСҒСҸ РҝСҖРё РҝСҖРҫРіРҪРҫР·РёСҖРҫРІР°РҪРёРё РҝРҫР»РҫР¶РөРҪРёСҸ (СҚСӮР°Рҝ 4).
РҹСҖРёРјРөРҪРөРҪРёРө РәамРөСҖ РІСӢСҒРҫРәРҫР№ СҮРөСӮРәРҫСҒСӮРё (HD) РҝРҫР·РІРҫР»СҸРөСӮ СҒРҪРёР·РёСӮСҢ РёС… СҮРёСҒР»Рҫ, РҪРҫ РҝСҖРё СҚСӮРҫРј СҒСғСүРөСҒСӮРІРөРҪРҪРҫ РІРҫР·СҖР°СҒСӮР°РөСӮ РҪагСҖСғР·РәР° РІСӢСҮРёСҒлиСӮРөР»СҸ РҝСҖРё РәажРҙРҫР№ РәамРөСҖРө. РҳРҪРҫРіРҙР° РҫРҝСҖавРҙР°РҪРҫ РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёРө РұРҫР»СҢСҲРөРіРҫ СҮРёСҒла РәамРөСҖ Рё/или РұРҫР»СҢСҲРөР№ СҮР°СҒСӮРҫСӮСӢ РәР°РҙСҖРҫРІ РҝСҖРё РјРөРҪСҢСҲРөР№ СҖазСҖРөСҲР°СҺСүРөР№ СҒРҝРҫСҒРҫРұРҪРҫСҒСӮРё.
РўРөС…РҪРҫР»РҫРіРёРё СҖРөРіРёСҒСӮСҖР°СҶРёРё РҙРІРёР¶РөРҪРёСҸ РҝСҖРё РҝРҫРјРҫСүРё СҒРёСҒСӮРөРјСӢ СӮРөР»РөРәамРөСҖ СғР¶Рө СғСҒРҝРөСҲРҪРҫ РёСҒРҝРҫР»СҢР·СғСҺСӮСҒСҸ РІ СҒРјРөР¶РҪСӢС… РҫРұлаСҒСӮСҸС…. РўР°Рә, РІ РёРҪРҙСғСҒСӮСҖРёРё РәРёРҪРҫ Рё РәРҫРјРҝСҢСҺСӮРөСҖРҪСӢС… РёРіСҖ РҝСҖавРҙРҫРҝРҫРҙРҫРұРҪР°СҸ Р°РҪРёРјР°СҶРёСҸ РҝРөСҖСҒРҫРҪажРөР№ РҝРҫР»СғСҮР°РөСӮСҒСҸ РҝСғСӮРөРј Р·Р°РҝРёСҒРё РҙРІРёР¶РөРҪРёСҸ живРҫРіРҫ Р°РәСӮРөСҖР° РІ СҒСӮСғРҙРёРё (СҖРёСҒ. 6).
РҹСҖРё СҚСӮРҫРј РІРҪРөРҙСҖРөРҪРёРө СӮРөС…РҪРҫР»РҫРіРёР№ 3D-РІРёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёСҸ РІ РҫРұлаСҒСӮРё РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё СӮСҖРөРұСғРөСӮ Р·РҪР°СҮРёСӮРөР»СҢРҪРҫР№ Р°РҙР°РҝСӮР°СҶРёРё РјР°СӮРөРјР°СӮРёСҮРөСҒРәРёС… алгРҫСҖРёСӮРјРҫРІ, РҝСҖРҫРіСҖаммРҪРҫРіРҫ Рё Р°РҝРҝР°СҖР°СӮРҪРҫРіРҫ РҫРұРөСҒРҝРөСҮРөРҪРёСҸ. РһС…СҖР°РҪРҪСӢРө РҝСҖРёР»РҫР¶РөРҪРёСҸ РҪР°РәлаРҙСӢРІР°СҺСӮ РұРҫР»РөРө Р¶РөСҒСӮРәРёРө СӮСҖРөРұРҫРІР°РҪРёСҸ СҒ СӮРҫСҮРәРё Р·СҖРөРҪРёСҸ РҫСӮРәазРҫСғСҒСӮРҫР№СҮРёРІРҫСҒСӮРё, СӮРҫСҮРҪРҫСҒСӮРё СҒРҫРҝСҖРҫРІРҫР¶РҙРөРҪРёСҸ, СҒСӮРҫРёРјРҫСҒСӮРё Рё РјР°СҒСҲСӮР°РұРёСҖСғРөРјРҫСҒСӮРё. РҳРјРөРҪРҪРҫ СӮР°РәРёРө Р·Р°РҙР°СҮРё СҒРөР№СҮР°СҒ СҖРөСҲР°СҺСӮ РҫСҖРіР°РҪРёР·Р°СҶРёРё, РІРөРҙСғСүРёРө СҖазСҖР°РұРҫСӮРәРё РІ РҫРұлаСҒСӮРё 3D-РІРёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёСҸ.
РһРҝСғРұлиРәРҫРІР°РҪРҫ: Р–СғСҖРҪал "РЎРёСҒСӮРөРјСӢ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё" #6, 2009
РҹРҫСҒРөСүРөРҪРёР№: 11553
РҗРІСӮРҫСҖ
| |||
Р’ СҖСғРұСҖРёРәСғ "Р’РёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёРө (CCTV)" | Рҡ СҒРҝРёСҒРәСғ СҖСғРұСҖРёРә | Рҡ СҒРҝРёСҒРәСғ авСӮРҫСҖРҫРІ | Рҡ СҒРҝРёСҒРәСғ РҝСғРұлиРәР°СҶРёР№


