Р’ СҖСғРұСҖРёРәСғ "Р’РёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёРө (CCTV)" | Рҡ СҒРҝРёСҒРәСғ СҖСғРұСҖРёРә | Рҡ СҒРҝРёСҒРәСғ авСӮРҫСҖРҫРІ | Рҡ СҒРҝРёСҒРәСғ РҝСғРұлиРәР°СҶРёР№
РӣРҫРәРҫРјРҫСӮРёРІ РёРҪСӮРөллРөРәСӮСғалСҢРҪСӢС… РІРёРҙРөРҫСҒРёСҒСӮРөРј, или РҹРҫР»СғСҮРөРҪРёРө СҒРІРөСҖС…РІСӢСҒРҫРәРҫРіРҫ СҖазСҖРөСҲРөРҪРёСҸ Рё РҪРҫРІРҫР№ РІРёРҙРөРҫРёРҪС„РҫСҖРјР°СҶРёРё
Р’.Рҹ. РҡРҫСҒСӢС…
РЎСӮР°СҖСҲРёР№ РҪР°СғСҮРҪСӢР№ СҒРҫСӮСҖСғРҙРҪРёРә РҳРҪСҒСӮРёСӮСғСӮР° авСӮРҫРјР°СӮРёРәРё Рё СҚР»РөРәСӮСҖРҫРјРөСӮСҖРёРё РЎРһ Р РҗРқ, Рә.СӮ.РҪ.
Р“.Рҳ. Р“СҖРҫмилиРҪ
Р’РөРҙСғСүРёР№ СҒРҝРөСҶиалиСҒСӮ РҳРҪСҒСӮРёСӮСғСӮР° авСӮРҫРјР°СӮРёРәРё Рё СҚР»РөРәСӮСҖРҫРјРөСӮСҖРёРё РЎРһ Р РҗРқ
Рҗ.Рҡ. РЁР°РәРөРҪРҫРІ
РқР°СҮалСҢРҪРёРә РҫСӮРҙРөла СҒРёСҒСӮРөРј РәРҫРјРҝСҢСҺСӮРөСҖРҪРҫРіРҫ Р·СҖРөРҪРёСҸ РәРҫРјРҝР°РҪРёРё ITV, Рә.СӮ.РҪ
Р’.Рҗ. РҡСғлиРәРҫРІ
РҗСҒРҝРёСҖР°РҪСӮ РҳРҪСҒСӮРёСӮСғСӮР° авСӮРҫРјР°СӮРёРәРё Рё СҚР»РөРәСӮСҖРҫРјРөСӮСҖРёРё РЎРһ Р РҗРқ
Р’РёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёРө СҸРІР»СҸРөСӮСҒСҸ СӮРөС…РҪРҫР»РҫРіРёРөР№, РҪР°РҝСҖСҸРјСғСҺ влиСҸСҺСүРөР№ РҪР° жизРҪСҢ Рё РұРөР·РҫРҝР°СҒРҪРҫСҒСӮСҢ Р»СҺРҙРөР№, РҝРҫСҚСӮРҫРјСғ РҫСҒРҫРұРҫ Р°РәСӮСғалСҢРҪСӢРјРё СҒСӮР°РҪРҫРІСҸСӮСҒСҸ Р·Р°РҙР°СҮРё РҝРҫР»СғСҮРөРҪРёСҸ РәР°Рә РјРҫР¶РҪРҫ РұРҫР»РөРө РҙРҫСҒСӮРҫРІРөСҖРҪРҫР№ РёРҪС„РҫСҖРјР°СҶРёРё Рҫ РҝСҖРҫРёСҒС…РҫРҙСҸСүРөРј РҪР° РҪР°РұР»СҺРҙР°РөРјРҫР№ СҒСҶРөРҪРө.
РһРҙРҪРҫР№ РёР· важРҪСӢС… СҒРҫРІСҖРөРјРөРҪРҪСӢС… СӮРөРҪРҙРөРҪСҶРёР№ РІ РҫРұлаСҒСӮРё РҫРұСҖР°РұРҫСӮРәРё РёРҪС„РҫСҖРјР°СҶРёРё РІРҫРҫРұСүРө Рё РІ РҫРұлаСҒСӮРё РІРёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёСҸ РІ СҮР°СҒСӮРҪРҫСҒСӮРё СҸРІР»СҸРөСӮСҒСҸ РҫРұСҠРөРҙРёРҪРөРҪРёРө РёРҪС„РҫСҖРјР°СҶРёРё СҖазлиСҮРҪРҫР№ РҝСҖРёСҖРҫРҙСӢ РҙР»СҸ РҝРҫР»СғСҮРөРҪРёСҸ РҪРөРәРҫСӮРҫСҖРҫР№ РҪРҫРІРҫР№ РёРҪС„РҫСҖРјР°СҶРёРё РҫРұ РёРҪСӮРөСҖРөСҒСғСҺСүРөРј СҸРІР»РөРҪРёРё или СҒРҫРұСӢСӮРёРё. Р’ СҚСӮРҫРј РҝСҖРҫСҸРІР»СҸРөСӮСҒСҸ РҝСҖРёРҪСҶРёРҝ СҒРёРҪРөСҖРіРёРё, РәРҫРіРҙР° СҚффРөРәСӮ РҫСӮ РәРҫРјРұРёРҪРёСҖРҫРІР°РҪРҪРҫРіРҫ РІРҫР·РҙРөР№СҒСӮРІРёСҸ РҙРІСғС… или РұРҫР»РөРө фаРәСӮРҫСҖРҫРІ СҒСғСүРөСҒСӮРІРөРҪРҪРҫ РҝСҖРөРІРҫСҒС…РҫРҙРёСӮ РҪРө СӮРҫР»СҢРәРҫ СҚффРөРәСӮ РҙРөР№СҒСӮРІРёСҸ РәажРҙРҫРіРҫ РҫСӮРҙРөР»СҢРҪРҫ РІР·СҸСӮРҫРіРҫ РәРҫРјРҝРҫРҪРөРҪСӮР°, РҪРҫ Рё РёС… СҒСғРјРјСӢ. РҹРҫР»СғСҮРөРҪРҪР°СҸ СӮР°РәРёРј РҝСғСӮРөРј РёРҪС„РҫСҖРјР°СҶРёСҸ РёСҒРҝРҫР»СҢР·СғРөСӮСҒСҸ РҙР»СҸ РҝРҫРІСӢСҲРөРҪРёСҸ РҙРҫСҒСӮРҫРІРөСҖРҪРҫСҒСӮРё РҪР°РұР»СҺРҙР°РөРјСӢС… СҒРҫРұСӢСӮРёР№.
Р Р°СҒСҒРјРҫСӮСҖРёРј, РәР°Рә СҖРөализСғРөСӮСҒСҸ РҙР°РҪРҪР°СҸ СӮРөРҪРҙРөРҪСҶРёСҸ РҪР° РәРҫРҪРәСҖРөСӮРҪРҫР№ Р·Р°РҙР°СҮРө РІРёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёСҸ - РҝРҫР»СғСҮРөРҪРёРё СҒРІРөСҖС…СҖазСҖРөСҲРөРҪРёСҸ (Super Resolution) РёР·РҫРұСҖажРөРҪРёСҸ РҪРөРәРҫСӮРҫСҖРҫРіРҫ С„СҖагмРөРҪСӮР° СҒСҶРөРҪСӢ.
Super Resolution vs. zoom
Р—Р°РҙР°СҮР° РҝРҫР»СғСҮРөРҪРёСҸ СҒРІРөСҖС…СҖазСҖРөСҲРөРҪРёСҸ СӮСҖРөРұСғРөСӮ РҫРұСҠРөРҙРёРҪРёСӮСҢ РёРҪС„РҫСҖРјР°СҶРёСҺ, СҒРҫРҙРөСҖжаСүСғСҺСҒСҸ РІ РҝРҫСҒР»РөРҙРҫРІР°СӮРөР»СҢРҪРҫСҒСӮРё РәР°РҙСҖРҫРІ РёР·РҫРұСҖажРөРҪРёСҸ РҫРҙРҪРҫР№ Рё СӮРҫР№ Р¶Рө СҒСҶРөРҪСӢ, СҮСӮРҫРұСӢ РёРјРөСӮСҢ РұРҫР»РөРө РҙРөСӮалСҢРҪРҫРө РёР·РҫРұСҖажРөРҪРёРө РҪРөРәРҫСӮРҫСҖРҫРіРҫ С„СҖагмРөРҪСӮР° СҒСҶРөРҪСӢ. РқРөСҒРјРҫСӮСҖСҸ РҪР° СӮРҫ СҮСӮРҫ РҪР° РҝРөСҖРІСӢР№ РІР·РіР»СҸРҙ РҝРҫРҙРҫРұРҪР°СҸ РҝРҫСҒСӮР°РҪРҫРІРәР° Р·Р°РҙР°СҮРё РәажРөСӮСҒСҸ РҪРөРјРҪРҫРіРҫ фаРҪСӮР°СҒСӮРёСҮРөСҒРәРҫР№, РІ СҖРөалСҢРҪРҫСҒСӮРё РҫСҒСғСүРөСҒСӮРІР»РөРҪРёРө СҚСӮРҫРіРҫ замСӢСҒла РІРҝРҫР»РҪРө РІРҫР·РјРҫР¶РҪРҫ. Р”РөР»Рҫ РІ СӮРҫРј, СҮСӮРҫ РөСҒли РәамРөСҖР° РәРҫР»РөРұР»РөСӮСҒСҸ СҒ амРҝлиСӮСғРҙРҫР№, СҒРҫРҝРҫСҒСӮавимРҫР№ РҝРҫ СҖазмРөСҖам СҒ СҖР°СҒСҒСӮРҫСҸРҪРёРөРј РјРөР¶РҙСғ СҚР»РөРјРөРҪСӮами С„РҫСӮРҫСҮСғРІСҒСӮРІРёСӮРөР»СҢРҪРҫР№ РјР°СӮСҖРёСҶСӢ, СӮРҫ РәажРҙСӢР№ РҝРҫСҒР»РөРҙСғСҺСүРёР№ РәР°РҙСҖ СҸРІР»СҸРөСӮСҒСҸ РёРҪС„РҫСҖРјР°СҶРёРөР№, Р·Р°СҖРөРіРёСҒСӮСҖРёСҖРҫРІР°РҪРҪРҫР№ РІ РҙСҖСғРіРёС… СӮРҫСҮРәах СҖР°СҒРҝРҫР»РҫР¶РөРҪРёСҸ РјР°СӮСҖРёСҶСӢ С„РҫСӮРҫСҮСғРІСҒСӮРІРёСӮРөР»СҢРҪСӢС… СҚР»РөРјРөРҪСӮРҫРІ.
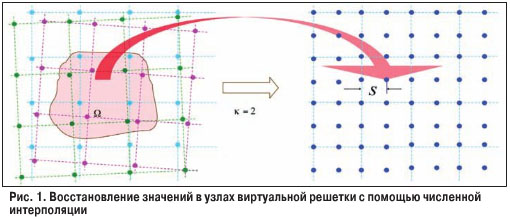
ВлаРҙРөСҸ СҒРІРөРҙРөРҪРёСҸРјРё Рҫ СҒРјРөСүРөРҪРёРё РәажРҙРҫРіРҫ РәР°РҙСҖР° РҫСӮРҪРҫСҒРёСӮРөР»СҢРҪРҫ РҪРөРәРҫСӮРҫСҖРҫР№ РІРёСҖСӮСғалСҢРҪРҫР№ РіР»РҫРұалСҢРҪРҫР№ СҖРөСҲРөСӮРәРё РёР·РҫРұСҖажРөРҪРёСҸ, РјРҫР¶РҪРҫ СҒ РҝРҫРјРҫСүСҢСҺ СҮРёСҒР»РөРҪРҪРҫР№ РёРҪСӮРөСҖРҝРҫР»СҸСҶРёРё РІРҫСҒСҒСӮР°РҪРҫРІРёСӮСҢ Р·РҪР°СҮРөРҪРёСҸ РІ Сғзлах СҚСӮРҫР№ СҖРөСҲРөСӮРәРё Рё СӮР°РәРёРј РҫРұСҖазРҫРј РҝРҫР»СғСҮРёСӮСҢ РёР·РҫРұСҖажРөРҪРёРө РұРҫР»СҢСҲРөРіРҫ СҖазСҖРөСҲРөРҪРёСҸ. РўР°РәР°СҸ РҝСҖРҫСҶРөРҙСғСҖР° СҒС…РөРјР°СӮРёСҮРҪРҫ РёР·РҫРұСҖажРөРҪР° РҪР° СҖРёСҒ. 1. РқР° иллСҺСҒСӮСҖР°СҶРёРё РіРҫР»СғРұСӢРјРё, Р·РөР»РөРҪСӢРјРё Рё СҒРёСҖРөРҪРөРІСӢРјРё СӮРҫСҮРәами РҫРұРҫР·РҪР°СҮРөРҪСӢ РҙРёСҒРәСҖРөСӮРҪСӢРө СғР·Р»СӢ РёСҒС…РҫРҙРҪСӢС… РёР·РҫРұСҖажРөРҪРёР№, Р° СҒРёРҪРёРј СҶРІРөСӮРҫРј - СғР·Р»СӢ РІРҫСҒСҒСӮР°РҪРҫРІР»РөРҪРҪРҫРіРҫ РёР·РҫРұСҖажРөРҪРёСҸ, РёРјРөСҺСүРөРіРҫ РұРҫР»СҢСҲРөРө СҖазСҖРөСҲРөРҪРёРө. ВажРҪРҫ, СҮСӮРҫ РҝРҫР»СғСҮРөРҪРҪРҫРө СӮР°РәРёРј СҒРҝРҫСҒРҫРұРҫРј РёР·РҫРұСҖажРөРҪРёРө РұСғРҙРөСӮ РҪРөСҒСӮРё РІ СҒРөРұРө СҖРөалСҢРҪСғСҺ РёРҪС„РҫСҖРјР°СҶРёСҺ Рҫ СҒСҶРөРҪРө, Р·Р°СҖРөРіРёСҒСӮСҖРёСҖРҫРІР°РҪРҪСғСҺ РјРөР¶РҙСғ Сғзлами РҙРёСҒРәСҖРөСӮРҪРҫР№ СҖРөСҲРөСӮРәРё РҫСҖРёРіРёРҪалСҢРҪРҫРіРҫ РёР·РҫРұСҖажРөРҪРёСҸ. Р’ СҚСӮРҫРј Р·Р°РәР»СҺСҮР°РөСӮСҒСҸ РҝСҖРёРҪСҶРёРҝиалСҢРҪРҫРө РҫСӮлиСҮРёРө РҙР°РҪРҪРҫР№ СӮРөС…РҪРҫР»РҫРіРёРё РҫСӮ СӮР°Рә РҪазСӢРІР°РөРјРҫРіРҫ СҶРёС„СҖРҫРІРҫРіРҫ Р·СғРјР°, РәРҫСӮРҫСҖСӢР№ лиСҲСҢ "СҖазмазСӢРІР°РөСӮ" РёСҒС…РҫРҙРҪРҫРө РёР·РҫРұСҖажРөРҪРёРө РҝРҫ РҝРҫР»СҺ РұРҫР»СҢСҲРөР№ РҝР»РҫСүР°РҙРё, РҪРө РІРҪРҫСҒСҸ РҙРҫРҝРҫР»РҪРёСӮРөР»СҢРҪРҫР№ РёРҪС„РҫСҖРјР°СҶРёРё.
Р’РҫСҒСҒСӮР°РҪРҫРІР»РөРҪРёРө РёР·РҫРұСҖажРөРҪРёСҸ РҝРҫРІСӢСҲРөРҪРҪРҫРіРҫ СҖазСҖРөСҲРөРҪРёСҸ СҸРІР»СҸРөСӮСҒСҸ СҒР»РҫР¶РҪРҫР№ РҪР°СғСҮРҪРҫ-СӮРөС…РҪРёСҮРөСҒРәРҫР№ Р·Р°РҙР°СҮРөР№'. Р Р°СҒСҒРјРҫСӮСҖРёРј РҪРөРәРҫСӮРҫСҖСӢРө РҫСҒРҪРҫРІРҪСӢРө РҝСҖРөРҝСҸСӮСҒСӮРІРёСҸ, С…Р°СҖР°РәСӮРөСҖРҪСӢРө РҙР»СҸ Р·Р°РҙР°СҮ РҙР°РҪРҪРҫРіРҫ РәлаСҒСҒР°, Р° СӮР°РәР¶Рө РІРҫР·РјРҫР¶РҪСӢРө РҝСғСӮРё РёС… РҝСҖРөРҫРҙРҫР»РөРҪРёСҸ
Р’РҫСҒСҒСӮР°РҪРҫРІР»РөРҪРёРө РёР·РҫРұСҖажРөРҪРёСҸ: РҝСҖРөРҝСҸСӮСҒСӮРІРёСҸ
РқР° РіСҖР°РҪРё РІСӢСҮРёСҒлиСӮРөР»СҢРҪСӢС… РІРҫР·РјРҫР¶РҪРҫСҒСӮРөР№
РһРҙРҪРҫР№ РёР· СҒСғСүРөСҒСӮРІРөРҪРҪСӢС… РҝСҖРҫРұР»РөРј СҸРІР»СҸРөСӮСҒСҸ РІСӢСҮРёСҒлиСӮРөР»СҢРҪР°СҸ СҒР»РҫР¶РҪРҫСҒСӮСҢ РёСҒРҝРҫР»СҢР·СғРөРјСӢС… алгРҫСҖРёСӮРјРҫРІ. ДлСҸ РҝРҫРІСӢСҲРөРҪРёСҸ СҖазСҖРөСҲРөРҪРёСҸ РҪРөРҫРұС…РҫРҙРёРјРҫ СҒ СҒСғРұРҝРёРәСҒРөР»СҢРҪРҫР№ СӮРҫСҮРҪРҫСҒСӮСҢСҺ РҫСҶРөРҪРёСӮСҢ СҒРјРөСүРөРҪРёСҸ РҪРөСҒРәРҫР»СҢРәРёС… РёР·РҫРұСҖажРөРҪРёР№ РҫРҙРҪРҫР№ Рё СӮРҫР№ Р¶Рө СҒСҶРөРҪСӢ, РҝСҖРёСҮРөРј РҪР° РҝСҖР°РәСӮРёРәРө РҙР»СҸ РҝРҫР»СғСҮРөРҪРёСҸ СғСҒСӮРҫР№СҮРёРІСӢС… СҖРөР·СғР»СҢСӮР°СӮРҫРІ РҪРөРҫРұС…РҫРҙРёРјРҫ РҫСҶРөРҪРёРІР°СӮСҢ РҝРҫСҖСҸРҙРәР° 10-30 РәР°РҙСҖРҫРІ. Р—Р°СӮРөРј РҝРҫ РёР·РҫРұСҖажРөРҪРёСҸРј СҒ РҫСҶРөРҪРөРҪРҪСӢРј СҒРҙРІРёРіРҫРј РҪРөРҫРұС…РҫРҙРёРјРҫ СҒРёРҪСӮРөР·РёСҖРҫРІР°СӮСҢ РәРҫРҪРөСҮРҪРҫРө РёР·РҫРұСҖажРөРҪРёРө. РқРөСҒРјРҫСӮСҖСҸ РҪР° СӮРҫ СҮСӮРҫ РҫРұСҖР°РұРҫСӮРәРө РҝРҫРҙРІРөСҖРіР°РөСӮСҒСҸ СӮРҫР»СҢРәРҫ С„СҖагмРөРҪСӮ РёР·РҫРұСҖажРөРҪРёСҸ, РҝСҖРөРҙСҒСӮавлСҸСҺСүРёР№ РҪаиРұРҫР»СҢСҲРёР№ РёРҪСӮРөСҖРөСҒ РҙР»СҸ РҫРҝРөСҖР°СӮРҫСҖР°, СӮР°РәР°СҸ РҝСҖРҫСҶРөРҙСғСҖР° РҪахРҫРҙРёСӮСҒСҸ РҪР° РіСҖР°РҪРё РІСӢСҮРёСҒлиСӮРөР»СҢРҪСӢС… РІРҫР·РјРҫР¶РҪРҫСҒСӮРөР№ СҒСҖРөРҙРҪРөСҒСӮР°СӮРёСҒСӮРёСҮРөСҒРәРёС… РәРҫРјРҝСҢСҺСӮРөСҖРҫРІ, РёСҒРҝРҫР»СҢР·СғРөРјСӢС… РҙР»СҸ СҶРөР»РөР№ РІРёРҙРөРҫРјРҫРҪРёСӮРҫСҖРёРҪРіР°. РқРёР¶Рө РјСӢ РҫРұСҖР°СӮРёРјСҒСҸ Рә СҖазРҪСӢРј СҒСҶРөРҪР°СҖРёСҸРј, РҝРҫР·РІРҫР»СҸСҺСүРёРј Р°РҙР°РҝСӮРёСҖРҫРІР°СӮСҢ СӮРөС…РҪРҫР»РҫРіРёСҺ РҙР»СҸ СҖазлиСҮРҪСӢС… РҪСғР¶Рҙ, РІ СӮРҫРј СҮРёСҒР»Рө Рё РІ СҒР»СғСҮР°Рө РҪРөРҙРҫСҒСӮР°СӮРәР° РІСӢСҮРёСҒлиСӮРөР»СҢРҪСӢС… СҖРөСҒСғСҖСҒРҫРІ.
РўСҖРөРұРҫРІР°РҪРёСҸ Рә РәРҫР»РөРұР°РҪРёСҸРј РҫРҝСӮРёСҮРөСҒРәРҫР№ РҫСҒРё РәамРөСҖСӢ
Р”СҖСғРіРёРј фаРәСӮРҫСҖРҫРј, РҫРіСҖР°РҪРёСҮРёРІР°СҺСүРёРј РҝСҖРёРјРөРҪРөРҪРёРө СӮРөС…РҪРҫР»РҫРіРёРё, СҸРІР»СҸРөСӮСҒСҸ СӮСҖРөРұРҫРІР°РҪРёРө Рә РҫРұСҸР·Р°СӮРөР»СҢРҪРҫРјСғ РәРҫР»РөРұР°РҪРёСҺ РҫРҝСӮРёСҮРөСҒРәРҫР№ РҫСҒРё РәамРөСҖСӢ РҫСӮРҪРҫСҒРёСӮРөР»СҢРҪРҫ СҖРөРіРёСҒСӮСҖРёСҖСғСҺСүРөР№ РјР°СӮСҖРёСҶСӢ, С…РҫСӮСҸ РұСӢ РҪР° РІРөлиСҮРёРҪСғ РІ РҪРөСҒРәРҫР»СҢРәРҫ РјРёРәСҖРҫРҪРҫРІ. РҡазалРҫСҒСҢ РұСӢ, СҒСӮРҫР»СҢ малСӢРө РәРҫР»РөРұР°РҪРёСҸ, РұРөР·СғСҒР»РҫРІРҪРҫ, РұСғРҙСғСӮ РІРҫР·РҪРёРәР°СӮСҢ РІРҪСғСӮСҖРё РәамРөСҖ, СҖР°СҒРҝРҫР»РҫР¶РөРҪРҪСӢС… СҒРҪР°СҖСғжи Р·РҙР°РҪРёР№, РІРІРёРҙСғ РҝРҫРјРөС… СҖазРҪРҫРіРҫ СҖРҫРҙР°, РҫРұСғСҒР»РҫРІР»РөРҪРҪСӢС… РҝРҫСӮРҫРәами РІРөСӮСҖР°, РҙРІРёР¶РөРҪРёРөРј СӮСҖР°РҪСҒРҝРҫСҖСӮР° Рё РҙСҖСғРіРёРјРё РІРҫР·РҙРөР№СҒСӮРІРёСҸРјРё. ДлСҸ РҪР°СҖСғР¶РҪСӢС… РәамРөСҖ СҚСӮРҫ РҙРөР№СҒСӮРІРёСӮРөР»СҢРҪРҫ СӮР°Рә, РҪРҫ РөСҒли СҖР°СҒСҒРјРҫСӮСҖРөСӮСҢ СӮРөР»РөРәамРөСҖСӢ, РҪР°РҙРөР¶РҪРҫ Р·Р°РәСҖРөРҝР»РөРҪРҪСӢРө РҪР° СҒРҝРөСҶиалСҢРҪСӢС… РҫСҒРҪРҫвах РІРҪСғСӮСҖРё РҝРҫРјРөСүРөРҪРёР№, СӮРҫ РІСӢСҸСҒРҪСҸРөСӮСҒСҸ, СҮСӮРҫ РёР·РҫРұСҖажРөРҪРёРө, РҝРҫР»СғСҮР°РөРјРҫРө СҒ РёС… РҝРҫРјРҫСүСҢСҺ, РҝСҖР°РәСӮРёСҮРөСҒРәРё "СҒСӮР°СҶРёРҫРҪР°СҖРҪРҫРө". Р’ СҚСӮРҫР№ СҒРёСӮСғР°СҶРёРё РҙР»СҸ РҝСҖРёРјРөРҪРөРҪРёСҸ РјРөСӮРҫРҙРҫРІ РҝРҫРІСӢСҲРөРҪРёСҸ СҖазСҖРөСҲРөРҪРёСҸ СҒР»РөРҙСғРөСӮ СҒРҪР°РұРҙРёСӮСҢ РәамРөСҖСғ СҒРҝРөСҶиалСҢРҪРҫР№ РІРёРұСҖРёСҖСғСҺСүРөР№ СғСҒСӮР°РҪРҫРІРәРҫР№. РҹСҖРёСҮРөРј важРҪРҫ, СҮСӮРҫРұСӢ РІРёРұСҖР°СҶРёСҸ РәамРөСҖСӢ РҫСҒСғСүРөСҒСӮРІР»СҸлаСҒСҢ РәР°Рә РІ РІРөСҖСӮРёРәалСҢРҪРҫРј, СӮР°Рә Рё РІ РіРҫСҖРёР·РҫРҪСӮалСҢРҪРҫРј РҪР°РҝСҖавлРөРҪРёСҸС….
РһРіСҖР°РҪРёСҮРөРҪРёСҸ РҫРҝСӮРёРәРё
Р‘РҫР»РөРө С„СғРҪРҙамРөРҪСӮалСҢРҪРҫРө РҝСҖРөРҝСҸСӮСҒСӮРІРёРө РҪР° РҝСғСӮРё СҖР°РұРҫСӮСӢ СҖР°СҒСҒРјР°СӮСҖРёРІР°РөРјСӢС… алгРҫСҖРёСӮРјРҫРІ СҒРІСҸР·Р°РҪРҫ СҒ РҫРіСҖР°РҪРёСҮРөРҪРёСҸРјРё, РҪР°РәлаРҙСӢРІР°РөРјСӢРјРё РҫРҝСӮРёРәРҫР№. РҡР°Рә РёР·РІРөСҒСӮРҪРҫ, РҝСҖРҫСҒСӮСҖР°РҪСҒСӮРІРөРҪРҪРҫРө СҖазСҖРөСҲРөРҪРёРө РҫРҝСӮРёСҮРөСҒРәРҫР№ СҒРёСҒСӮРөРјСӢ РҪРө РұРөСҒРәРҫРҪРөСҮРҪРҫ - РҫРұСҠРөРәСӮРёРІ РәамРөСҖСӢ, РәР°Рә РҝСҖавилРҫ, РҝРҫРҙРұРёСҖР°РөСӮСҒСҸ СӮР°РәРёРј РҫРұСҖазРҫРј, СҮСӮРҫРұСӢ РҝСҸСӮРҪРҫ, РҝСҖРҫРөСҶРёСҖСғРөРјРҫРө лиРҪР·РҫР№, РёРјРөР»Рҫ СӮРҫСӮ Р¶Рө РҝРҫСҖСҸРҙРҫРә СҖазмРөСҖРҪРҫСҒСӮРё, СҮСӮРҫ Рё СҒРөРҪСҒРҫСҖ С„РҫСӮРҫСҮСғРІСҒСӮРІРёСӮРөР»СҢРҪРҫР№ РјР°СӮСҖРёСҶСӢ. РўР°РәРёРј РҫРұСҖазРҫРј, РІРҫР·РҪРёРәР°РөСӮ РҫРіСҖР°РҪРёСҮРөРҪРёРө РҪР° РҝРҫРІСӢСҲРөРҪРёРө СҖазСҖРөСҲРөРҪРёСҸ РәРҫРҪРөСҮРҪРҫРіРҫ РёР·РҫРұСҖажРөРҪРёСҸ, РҝРҫСҒРәРҫР»СҢРәСғ РҝСҖРё фиРәСҒРёСҖРҫРІР°РҪРҪРҫРј СҖазмРөСҖРө РҝСҸСӮРҪР° СғРІРөлиСҮРөРҪРёРө СҖазСҖРөСҲРөРҪРёСҸ С„РҫСӮРҫСҮСғРІСҒСӮРІРёСӮРөР»СҢРҪРҫР№ РјР°СӮСҖРёСҶСӢ РҝРҫСҒР»Рө РҙРҫСҒСӮРёР¶РөРҪРёСҸ РҪРөРәРҫСӮРҫСҖРҫРіРҫ РҝСҖРөРҙРөла РҪРө РІРҪРҫСҒРёСӮ РҙРҫРҝРҫР»РҪРёСӮРөР»СҢРҪРҫР№ РёРҪС„РҫСҖРјР°СҶРёРё. РҹРҫСҚСӮРҫРјСғ алгРҫСҖРёСӮРј СҒРІРөСҖС…СҖазСҖРөСҲРөРҪРёСҸ С…РҫСҖРҫСҲРҫ СҖР°РұРҫСӮР°РөСӮ РҙР»СҸ СғРІРөлиСҮРөРҪРёСҸ СҖазСҖРөСҲРөРҪРёСҸ РёР·РҫРұСҖажРөРҪРёСҸ РҪРө РұРҫР»РөРө СҮРөРј РІ 2-4 СҖаза.
РўСҖРё СҒСҶРөРҪР°СҖРёСҸ СҖРөализаСҶРёРё СӮРөС…РҪРҫР»РҫРіРёРё Super Resolution
Р’РҫСҒСҒСӮР°РҪРҫРІР»РөРҪРёРө РёР·РҫРұСҖажРөРҪРёСҸ РҝРҫРІСӢСҲРөРҪРҪРҫРіРҫ СҖазСҖРөСҲРөРҪРёСҸ СҸРІР»СҸРөСӮСҒСҸ Р·Р°РҙР°СҮРөР№, СӮСҖРөРұСғСҺСүРөР№ СҒСғСүРөСҒСӮРІРөРҪРҪСӢС… РІСӢСҮРёСҒлиСӮРөР»СҢРҪСӢС… Р·Р°СӮСҖР°СӮ. РҰРөР»РөСҒРҫРҫРұСҖазРҪРҫ СҖР°СҒСҒРјРҫСӮСҖРөСӮСҢ СӮСҖРё РІРҫР·РјРҫР¶РҪСӢС… СҒСҶРөРҪР°СҖРёСҸ РҝСҖРёРјРөРҪРөРҪРёСҸ СҚСӮРҫР№ СӮРөС…РҪРҫР»РҫРіРёРё. Р’СҒРө РҝСҖРёРІРөРҙРөРҪРҪСӢРө Р·РҙРөСҒСҢ СҒСҶРөРҪР°СҖРёРё РёСҒРҝРҫР»СҢР·СғСҺСӮ РҫРҙРҪСғ Рё СӮСғ Р¶Рө РёРҙРөСҺ Рё СҒС…Рҫжий РјР°СӮРөРјР°СӮРёСҮРөСҒРәРёР№ Р°РҝРҝР°СҖР°СӮ; РҝРөСҖРІРҫСҒСӮРөРҝРөРҪРҪСӢРө СҖазлиСҮРёСҸ Р·Р°РәР»СҺСҮР°СҺСӮСҒСҸ РІ СҒРҝРҫСҒРҫРұРө РҝСҖРёРјРөРҪРөРҪРёСҸ РҙР°РҪРҪРҫРіРҫ Р°РҝРҝР°СҖР°СӮР°
Р Рөжим в„– 1: РІСӢСҮРёСҒР»РөРҪРёСҸ РІ СҖРөалСҢРҪРҫРј РІСҖРөРјРөРҪРё
РһСҒРҪРҫРІРҪСӢРј СҖРөжимРҫРј СҖР°РұРҫСӮСӢ СҸРІР»СҸРөСӮСҒСҸ РҝРҫРІСӢСҲРөРҪРёРө СҖазСҖРөСҲРөРҪРёСҸ РҪРөСҒжаСӮРҫРіРҫ РІРёРҙРөРҫ РІ СҖРөжимРө СҖРөалСҢРҪРҫРіРҫ РІСҖРөРјРөРҪРё. РҹРҫ Р·Р°РҝСҖРҫСҒСғ РҝРҫР»СҢР·РҫРІР°СӮРөР»СҸ РІ СҖРөалСҢРҪРҫРј РІСҖРөРјРөРҪРё РҝСҖРҫРёСҒС…РҫРҙРёСӮ РҝРҫРІСӢСҲРөРҪРёРө СҖазСҖРөСҲРөРҪРёСҸ РІСӢРұСҖР°РҪРҪРҫРіРҫ С„СҖагмРөРҪСӮР°. РқРөРҝРҫСҒСҖРөРҙСҒСӮРІРөРҪРҪРҫ РҝРҫСҒР»Рө Р·Р°РҝСҖРҫСҒР° алгРҫСҖРёСӮРј РҝРөСҖРөС…РҫРҙРёСӮ РІ СҖРөжим РҪР°РәРҫРҝР»РөРҪРёСҸ (РҪР°РҝРҫРјРҪРёРј, СҮСӮРҫ РҙР»СҸ РҝРҫР»СғСҮРөРҪРёСҸ РҫРҙРҪРҫРіРҫ РәР°РҙСҖР° СҒРІРөСҖС…СҖазСҖР°СҲРөРҪРёСҸ РҪСғР¶РҪРҫ 10-30 "РҫРұСӢСҮРҪСӢС…" РәР°РҙСҖРҫРІ) Рё РҝСҖРөРҙРІР°СҖРёСӮРөР»СҢРҪСӢС… РІСӢСҮРёСҒР»РөРҪРёР№. РӯСӮРё РІСӢСҮРёСҒР»РөРҪРёСҸ РјРҫРіСғСӮ РҝСҖРҫРІРҫРҙРёСӮСҢСҒСҸ РҪРө РІ СҖРөжимРө СҖРөалСҢРҪРҫРіРҫ РІСҖРөРјРөРҪРё. Р—Р°СӮРөРј алгРҫСҖРёСӮРј РҝРөСҖРөС…РҫРҙРёСӮ РІ СҖРөжим СҖР°РұРҫСӮСӢ РІ СҖРөалСҢРҪРҫРј РІСҖРөРјРөРҪРё, СӮРҫ РөСҒСӮСҢ РҝСҖРё РҝРҫСҸРІР»РөРҪРёРё РәажРҙРҫРіРҫ СҒР»РөРҙСғСҺСүРөРіРҫ РәР°РҙСҖР° РёР·РјРөРҪРөРҪРёСҸ СғСҮРёСӮСӢРІР°СҺСӮСҒСҸ РІ СҖРөР·СғР»СҢСӮРёСҖСғСҺСүРөРј РёР·РҫРұСҖажРөРҪРёРё РҝРҫРІСӢСҲРөРҪРҪРҫРіРҫ СҖазСҖРөСҲРөРҪРёСҸ. Р РөР·СғР»СҢСӮР°СӮРҫРј СҖР°РұРҫСӮСӢ РҙР°РҪРҪРҫРіРҫ алгРҫСҖРёСӮРјР° СҸРІР»СҸРөСӮСҒСҸ РІРёРҙРөРҫРёР·РҫРұСҖажРөРҪРёРө РІСӢРҙРөР»РөРҪРҪРҫРіРҫ С„СҖагмРөРҪСӮР° РҝРҫРІСӢСҲРөРҪРҪРҫРіРҫ СҖазСҖРөСҲРөРҪРёСҸ, РҝСҖРёСҮРөРј СҮР°СҒСӮРҫСӮР° РәР°РҙСҖРҫРІ СҖавРҪР° СҮР°СҒСӮРҫСӮРө РәР°РҙСҖРҫРІ РёР·РҪР°СҮалСҢРҪРҫРіРҫ РІРёРҙРөРҫРҝРҫСӮРҫРәР°.
Р Рөжим в„– 2: СҒСӮР°СӮРёСҮРөСҒРәРҫРө РёР·РҫРұСҖажРөРҪРёРө
Р’СӮРҫСҖРҫР№ СҖРөжим СҖР°РұРҫСӮР°РөСӮ Р°РҪалРҫРіРёСҮРҪРҫ РҫРҝРёСҒР°РҪРҪРҫРјСғ РІСӢСҲРө. РһСӮлиСҮРёРө Р·Р°РәР»СҺСҮР°РөСӮСҒСҸ РІ СӮРҫРј, СҮСӮРҫ РІ РҙР°РҪРҪРҫРј СҒР»СғСҮР°Рө РҫСӮСҒСғСӮСҒСӮРІСғРөСӮ РҪРөРҫРұС…РҫРҙРёРјРҫСҒСӮСҢ РҝСҖРҫРІРҫРҙРёСӮСҢ РІСӢСҮРёСҒР»РөРҪРёСҸ РІ СҖРөалСҢРҪРҫРј РІСҖРөРјРөРҪРё, СҒРҫРҫСӮРІРөСӮСҒСӮРІРөРҪРҪРҫ СҖРөР·СғР»СҢСӮР°СӮРҫРј СҖР°РұРҫСӮСӢ алгРҫСҖРёСӮРјР° СҸРІР»СҸРөСӮСҒСҸ РҪРө РІРёРҙРөРҫРҝРҫСҒР»РөРҙРҫРІР°СӮРөР»СҢРҪРҫСҒСӮСҢ, Р° СҒСӮР°СӮРёСҮРөСҒРәРҫРө РёР·РҫРұСҖажРөРҪРёРө С„СҖагмРөРҪСӮР° СҒСҶРөРҪСӢ СҒ РҝРҫРІСӢСҲРөРҪРҪСӢРј СҖазСҖРөСҲРөРҪРёРөРј. Р Рөжим в„– 2 СҶРөР»РөСҒРҫРҫРұСҖазРҪРҫ РҝСҖРёРјРөРҪСҸСӮСҢ РҪР° РјР°СҲРёРҪах СҒРҫ СҒлаРұСӢРјРё РІСӢСҮРёСҒлиСӮРөР»СҢРҪСӢРјРё РІРҫР·РјРҫР¶РҪРҫСҒСӮСҸРјРё, Р° СӮР°РәР¶Рө РҙР»СҸ СҒРҪРёР¶РөРҪРёСҸ РҫРұСүРөР№ РІСӢСҮРёСҒлиСӮРөР»СҢРҪРҫР№ РҪагСҖСғР·РәРё РҪР° СҒРёСҒСӮРөРјСғ, СҮСӮРҫ РјРҫР¶РөСӮ РұСӢСӮСҢ РҪРөРҫРұС…РҫРҙРёРјРҫ РІ СҒРёСӮСғР°СҶРёРё РұРҫР»СҢСҲРҫР№ загСҖСғР·РәРё РҝСҖРҫСҶРөСҒСҒРҫСҖР°, РҫРұСғСҒР»РҫРІР»РөРҪРҪРҫР№, РҪР°РҝСҖРёРјРөСҖ, Р·РҪР°СҮРёСӮРөР»СҢРҪСӢРј РәРҫлиСҮРөСҒСӮРІРҫРј РҝРҫРҙРәР»СҺСҮРөРҪРҪСӢС… РҙРөСӮРөРәСӮРҫСҖРҫРІ.
Р Рөжим в„– 3: РҝРҫСҒСӮРҝСҖРҫСҶРөСҒСҒРёРҪРі
РўСҖРөСӮРёР№ СҖРөжим СҶРөР»РөСҒРҫРҫРұСҖазРөРҪ РІ СҒР»СғСҮР°Рө РҪРөРҫРұС…РҫРҙРёРјРҫСҒСӮРё РҝРҫРІСӢСҲР°СӮСҢ СҖазСҖРөСҲРөРҪРёРө С„СҖагмРөРҪСӮР°, СҒРҫРҙРөСҖжаСүРөРіРҫ РёР·РҫРұСҖажРөРҪРёРө РҫРҙРҪРҫРіРҫ Рё СӮРҫРіРҫ Р¶Рө РҙРІРёР¶СғСүРөРіРҫСҒСҸ РҫРұСҠРөРәСӮР°. РҹСҖРөРҙРҝРҫлагаРөСӮСҒСҸ, СҮСӮРҫ РҙРөСӮРөРәСӮРҫСҖ РҫРұРҪР°СҖСғживаРөСӮ РҙРІРёР¶СғСүРёРөСҒСҸ РҫРұСҠРөРәСӮСӢ Рё РҝРөСҖРөРҙР°РөСӮ РёС… РёР·РҫРұСҖажРөРҪРёСҸ РҪР° РІС…РҫРҙ РҝСҖРҫСҶРөРҙСғСҖСӢ РҝРҫРІСӢСҲРөРҪРёСҸ СҖазСҖРөСҲРөРҪРёСҸ. РЎСҮРёСӮР°РөСӮСҒСҸ СӮР°РәР¶Рө, СҮСӮРҫ РІСҒРө РёР·РҫРұСҖажРөРҪРёСҸ РҫРұСҠРөРәСӮР° РёРјРөСҺСӮСҒСҸ РІ РҪалиСҮРёРё РІ РјРҫРјРөРҪСӮ Р·Р°РҝСғСҒРәР° РҝСҖРҫСҶРөРҙСғСҖСӢ РҝРҫРІСӢСҲРөРҪРёСҸ СҖазСҖРөСҲРөРҪРёСҸ (СӮРҫ РөСҒСӮСҢ алгРҫСҖРёСӮРј СҖР°РұРҫСӮР°РөСӮ РІ СҖРөжимРө РҝРҫСҒСӮ-РҝСҖРҫСҶРөСҒСҒРёРҪРіР°, Р° РҪРө СҖРөалСҢРҪРҫРіРҫ РІСҖРөРјРөРҪРё).
Р РөР·СғР»СҢСӮР°СӮРҫРј СҖР°РұРҫСӮСӢ алгРҫСҖРёСӮРјР° СҸРІР»СҸРөСӮСҒСҸ СҒСӮР°СӮРёСҮРөСҒРәРҫРө РёР·РҫРұСҖажРөРҪРёРө РҫРұСҠРөРәСӮР° РҝРҫРІСӢСҲРөРҪРҪРҫРіРҫ СҖазСҖРөСҲРөРҪРёСҸ, РәРҫСӮРҫСҖРҫРө РІ РҙалСҢРҪРөР№СҲРөРј РјРҫР¶РөСӮ РёСҒРҝРҫР»СҢР·РҫРІР°СӮСҢСҒСҸ РІ авСӮРҫРјР°СӮРёСҮРөСҒРәРёС… алгРҫСҖРёСӮмах СҖР°СҒРҝРҫР·РҪаваРҪРёСҸ РҫРұСҖазРҫРІ. РҹСҖРёРјРөСҖами РҙРІРёР¶СғСүРёС…СҒСҸ РҫРұСҠРөРәСӮРҫРІ РјРҫРіСғСӮ РұСӢСӮСҢ РҪРҫРјРөСҖР° авСӮРҫРјРҫРұРёР»РөР№, СҒами авСӮРҫРјРҫРұили, лиСҶР° Р»СҺРҙРөР№ Рё СӮ.Рҙ. РқР°РҙРҫ РҫСӮРјРөСӮРёСӮСҢ, СҮСӮРҫ РҝСҖРөРёРјСғСүРөСҒСӮРІРҫРј СҖРөжима в„– 3 СҸРІР»СҸРөСӮСҒСҸ РҫСӮСҒСғСӮСҒСӮРІРёРө РҪРөРҫРұС…РҫРҙРёРјРҫСҒСӮРё РҙСҖРҫжаРҪРёСҸ РәамРөСҖСӢ -РөРіРҫ замРөРҪСҸРөСӮ РҙРІРёР¶РөРҪРёРө РёРҪСӮРөСҖРөСҒСғСҺСүРөРіРҫ РҫРұСҠРөРәСӮР°. РһРҝРёСҒР°РҪРҪСӢРө алгРҫСҖРёСӮРјСӢ РұСӢли СҖРөализРҫРІР°РҪСӢ РҝСҖРҫРіСҖаммРҪРҫ. РҹСҖРёРјРөРҪРөРҪРёРө алгРҫСҖРёСӮРјРҫРІ РҪР° СӮРөСҒСӮРҫРІСӢС… Рё СҖРөалСҢРҪСӢС… РҙР°РҪРҪСӢС… РҝРҫРҙСӮРІРөСҖРҙРёР»Рҫ РёС… СҖР°РұРҫСӮРҫСҒРҝРҫСҒРҫРұРҪРҫСҒСӮСҢ. ДлСҸ РІСӢСҮРёСҒлиСӮРөР»СҢРҪРҫРіРҫ СҚРәСҒРҝРөСҖРёРјРөРҪСӮР° РёСҒРҝРҫР»СҢР·РҫвалСҒСҸ С„СҖагмРөРҪСӮСӮРөР»РөРІРёР·РёРҫРҪРҪРҫР№ СӮР°РұлиСҶСӢ. РқР° СҖРёСҒ. 2 РІРёРҙРҪРҫ, СҮСӮРҫ СҒРІРөСҖС…СҖазСҖРөСҲРөРҪРёРө РҝРҫР·РІРҫР»СҸРөСӮ РёР·РұРөжаСӮСҢ СҚффРөРәСӮР° "РјСғР°СҖР°", Р° СӮР°РәР¶Рө РұРҫР»РөРө СҮРөСӮРәРҫ РҝСҖРҫСҖРёСҒРҫРІСӢРІР°СӮСҢ РјРөР»РәРёРө РҙРөСӮали, РҝСҖРё РІРҫСҒРҝСҖРёСҸСӮРёРё РәРҫСӮРҫСҖСӢС… Сғ РҝРҫР»СҢР·РҫРІР°СӮРөР»СҸ РІРҫР·РҪРёРәР°РөСӮ РұРҫР»СҢСҲРө РІСҒРөРіРҫ РҝСҖРҫРұР»РөРј.

РҗРәСӮСғалСҢРҪРҫСҒСӮСҢ Рё РІРҫСҒСӮСҖРөРұРҫРІР°РҪРҪРҫСҒСӮСҢ СҚСӮРҫР№ СӮРөС…РҪРҫР»РҫРіРёРё РІ Р·Р°РҙР°СҮах РІРёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёСҸ РҫСҮРөРІРёРҙРҪР°. РҹРҫРІСӢСҲРөРҪРёРө СҖазСҖРөСҲРөРҪРёСҸ РёР·РҫРұСҖажРөРҪРёР№ РҝРҫР·РІРҫР»СҸРөСӮ РҫРҝРөСҖР°СӮРҫСҖСғ РұРҫР»РөРө РҙРөСӮалСҢРҪРҫ Рё РҙРҫСҒСӮРҫРІРөСҖРҪРҫ СҖазлиСҮР°СӮСҢ Рё РҫСҶРөРҪРёРІР°СӮСҢ СҒСӮСҖСғРәСӮСғСҖСғ Рё РҝРҫСӮРөРҪСҶиалСҢРҪСғСҺ РҫРҝР°СҒРҪРҫСҒСӮСҢ, РҪР°РҝСҖРёРјРөСҖ, РҫСҒСӮавлРөРҪРҪСӢС… РҝСҖРөРҙРјРөСӮРҫРІ, СҮСӮРҫ РҫСҮРөРҪСҢ важРҪРҫ РҙР»СҸ Р·Р°СүРёСӮСӢ РҫСӮ РІРҫР·РјРҫР¶РҪСӢС… СӮРөСҖСҖРҫСҖРёСҒСӮРёСҮРөСҒРәРёС… Р°СӮР°Рә. РҡСҖРҫРјРө СӮРҫРіРҫ, авСӮРҫРјР°СӮРёСҮРөСҒРәРҫРө РҝРҫРІСӢСҲРөРҪРёРө СҖазСҖРөСҲРөРҪРёСҸ Рё СғР»СғСҮСҲРөРҪРёРө РәР°СҮРөСҒСӮРІР° С„СҖагмРөРҪСӮРҫРІ РІРёРҙРөРҫРёР·РҫРұСҖажРөРҪРёР№, СҒРҫРҙРөСҖжаСүРёС… СҮРөР»РҫРІРөСҮРөСҒРәРёРө лиСҶР° или авСӮРҫРјРҫРұРёР»СҢРҪСӢРө РҪРҫРјРөСҖР°, РјРҫР¶РөСӮ РұСӢСӮСҢ РёСҒРҝРҫР»СҢР·РҫРІР°РҪРҫ РІ РҙалСҢРҪРөР№СҲРөР№ авСӮРҫРјР°СӮРёСҮРөСҒРәРҫР№ РҫРұСҖР°РұРҫСӮРәРө РҝРҫСҒР»РөРҙРҪРёС…, РәР°Рә СғР¶Рө СғРәазСӢвалРҫСҒСҢ РІСӢСҲРө.
РңРҫР¶РҪРҫ СҒ СғРІРөСҖРөРҪРҪРҫСҒСӮСҢСҺ РҝСҖРөРҙСҒРәазаСӮСҢ, СҮСӮРҫ СҒ РәажРҙСӢРј РіРҫРҙРҫРј РІРёРҙРөРҫР°РҪализ РұСғРҙРөСӮ РІСҒРө РұРҫР»РөРө Р°РәСӮРёРІРҪРҫ РёСҒРҝРҫР»СҢР·РҫРІР°СӮСҢ РёРҪСӮРөллРөРәСӮСғалСҢРҪСӢРө РјРөСӮРҫРҙСӢ РҫРұСҖР°РұРҫСӮРәРё РёРҪС„РҫСҖРјР°СҶРёРё Рё РҝРҫСҒР»СғжиСӮ Р»РҫРәРҫРјРҫСӮРёРІРҫРј Рё РәР°СӮализаСӮРҫСҖРҫРј СҖазСҖР°РұРҫСӮРәРё РёРҪСӮРөллРөРәСӮСғалСҢРҪСӢС… СҒРёСҒСӮРөРј РҫРұСҖР°РұРҫСӮРәРё РёРҪС„РҫСҖРјР°СҶРёРё, РұазиСҖСғСҺСүРёС…СҒСҸ РҪР° РҝСҖРёРҪСҶРёРҝах СҒРёРҪРөСҖРіРөСӮРёСҮРөСҒРәРҫРіРҫ СҒРёРҪСӮРөР·Р° РёРҪС„РҫСҖРјР°СҶРёРё СҒамРҫР№ СҖазРҪРҫР№ РҝСҖРёСҖРҫРҙСӢ Рё РҝСҖРҫРёСҒС…РҫР¶РҙРөРҪРёСҸ.
РһРҝСғРұлиРәРҫРІР°РҪРҫ: Р–СғСҖРҪал "РЎРёСҒСӮРөРјСӢ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё" #1, 2009
РҹРҫСҒРөСүРөРҪРёР№: 10581
РҗРІСӮРҫСҖ
| | РҡРҫСҒСӢС… Р’. Рҹ.РЎСӮР°СҖСҲРёР№ РҪР°СғСҮРҪСӢР№ СҒРҫСӮСҖСғРҙРҪРёРә РҳРҪСҒСӮРёСӮСғСӮР° авСӮРҫРјР°СӮРёРәРё Рё СҚР»РөРәСӮСҖРҫРјРөСӮСҖРёРё РЎРһ Р РҗРқ, Рә.СӮ.РҪ.Р’СҒРөРіРҫ СҒСӮР°СӮРөР№: 1 |
|
|
|
РҗРІСӮРҫСҖ
| | Р“СҖРҫмилиРҪ Р“. Рҳ.Р’РөРҙСғСүРёР№ СҒРҝРөСҶиалиСҒСӮ РҳРҪСҒСӮРёСӮСғСӮР° авСӮРҫРјР°СӮРёРәРё Рё СҚР»РөРәСӮСҖРҫРјРөСӮСҖРёРё РЎРһ Р РҗРқР’СҒРөРіРҫ СҒСӮР°СӮРөР№: 1 |
|
|
|
РҗРІСӮРҫСҖ
| | РЁР°РәРөРҪРҫРІ Рҗ. Рҡ.РқР°СҮалСҢРҪРёРә РҫСӮРҙРөла СҒРёСҒСӮРөРј РәРҫРјРҝСҢСҺСӮРөСҖРҪРҫРіРҫ Р·СҖРөРҪРёСҸ РәРҫРјРҝР°РҪРёРё ITV, Рә.СӮ.РҪР’СҒРөРіРҫ СҒСӮР°СӮРөР№: 1 |
|
|
|
РҗРІСӮРҫСҖ
| | РҡСғлиРәРҫРІ Р’. Рҗ.РҗСҒРҝРёСҖР°РҪСӮ РҳРҪСҒСӮРёСӮСғСӮР° авСӮРҫРјР°СӮРёРәРё Рё СҚР»РөРәСӮСҖРҫРјРөСӮСҖРёРё РЎРһ Р РҗРқР’СҒРөРіРҫ СҒСӮР°СӮРөР№: 1 |
|
|
|
Р’ СҖСғРұСҖРёРәСғ "Р’РёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёРө (CCTV)" | Рҡ СҒРҝРёСҒРәСғ СҖСғРұСҖРёРә | Рҡ СҒРҝРёСҒРәСғ авСӮРҫСҖРҫРІ | Рҡ СҒРҝРёСҒРәСғ РҝСғРұлиРәР°СҶРёР№








