






Р’ СҖСғРұСҖРёРәСғ "Р’РёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёРө (CCTV)" | Рҡ СҒРҝРёСҒРәСғ СҖСғРұСҖРёРә | Рҡ СҒРҝРёСҒРәСғ авСӮРҫСҖРҫРІ | Рҡ СҒРҝРёСҒРәСғ РҝСғРұлиРәР°СҶРёР№
РӨГУРҹ "РЎРқРҹРһ "РӯР»РөСҖРҫРҪ" СғР¶Рө РұРҫР»РөРө 50 Р»РөСӮ Р·Р°РҪРёРјР°РөСӮСҒСҸ СҖазСҖР°РұРҫСӮРәРҫР№ Рё РҝСҖРҫРёР·РІРҫРҙСҒСӮРІРҫРј СҒРёСҒСӮРөРј физиСҮРөСҒРәРҫР№ Р·Р°СүРёСӮСӢ (РЎРӨР—) РәСҖРёСӮРёСҮРөСҒРәРё важРҪСӢС… РҫРұСҠРөРәСӮРҫРІ Рё СҸРІР»СҸРөСӮСҒСҸ лиРҙРөСҖРҫРј РІ СҒРІРҫРөР№ РҫРұлаСҒСӮРё СҒСҖРөРҙРё РҫСӮРөСҮРөСҒСӮРІРөРҪРҪСӢС… РәРҫРјРҝР°РҪРёР№.
Р’ СҒРҫРІСҖРөРјРөРҪРҪРҫРј РјРёСҖРө РәСҖР°РөСғРіРҫР»СҢРҪСӢРј РәамРҪРөРј СҒРёСҒСӮРөРјСӢ физиСҮРөСҒРәРҫР№ Р·Р°СүРёСӮСӢ (РЎРӨР—) СҸРІР»СҸРөСӮСҒСҸ РҝРҫРҙСҒРёСҒСӮРөРјР° РІРёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёСҸ. Р СӢРҪРҫРә СҒРёСҒСӮРөРј РІРёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёСҸ РҪРөСғРәР»РҫРҪРҪРҫ СҖР°СҒСӮРөСӮ, РҝРҫСҸРІР»СҸСҺСӮСҒСҸ РҪРҫРІСӢРө РҝСҖРҫРёР·РІРҫРҙРёСӮРөли, СҖР°СҒСҲРёСҖСҸРөСӮСҒСҸ РјРҫРҙРөР»СҢРҪСӢР№ СҖСҸРҙ, РҫРұРҫСҖСғРҙРҫРІР°РҪРёРө СҒСӮР°РҪРҫРІРёСӮСҒСҸ РұРҫР»РөРө РҙРҫСҒСӮСғРҝРҪСӢРј. Р’ СҚСӮРёС… СғСҒР»РҫРІРёСҸС… РҝРҫСӮСҖРөРұРёСӮРөР»СҢ РІРҝСҖавРө РҫжиРҙР°СӮСҢ, СҮСӮРҫ, РәСғРҝРёРІ РұРҫР»СҢСҲРөРө РәРҫлиСҮРөСҒСӮРІРҫ РәамРөСҖ РІРёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёСҸ, РҫРҪ РҝРҫРІСӢСҒРёСӮ СғСҖРҫРІРөРҪСҢ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё РҫС…СҖР°РҪСҸРөРјРҫРіРҫ РҫРұСҠРөРәСӮР°. РһРҙРҪР°РәРҫ РҪР° РҝСҖР°РәСӮРёРәРө СғРІРөлиСҮРөРҪРёРө СҮРёСҒла РәамРөСҖ СғСҒиливаРөСӮ РҪагСҖСғР·РәСғ РҪР° РҫРҝРөСҖР°СӮРҫСҖРҫРІ РЎРӨР—, СҮСӮРҫ РІ РәРҫРҪРөСҮРҪРҫРј РёСӮРҫРіРө РҝагСғРұРҪРҫ СҒРәазСӢРІР°РөСӮСҒСҸ РҪР° СғСҖРҫРІРҪРө РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё, Р° СҖР°СҒСҲРёСҖРөРҪРёРө СҲСӮР°СӮР° РҫРҝРөСҖР°СӮРҫСҖРҫРІ СғС…СғРҙСҲР°РөСӮ СҒРҫРҫСӮРҪРҫСҲРөРҪРёРө СҶРөРҪСӢ Рё РәР°СҮРөСҒСӮРІР° РЎРӨР—.
ДлСҸ СҖРөСҲРөРҪРёСҸ РҙР°РҪРҪРҫР№ РҝСҖРҫРұР»РөРјСӢ РҝСҖРёРјРөРҪСҸСҺСӮСҒСҸ РІРёРҙРөРҫРҙРөСӮРөРәСӮРҫСҖСӢ, РҝРҫР·РІРҫР»СҸСҺСүРёРө авСӮРҫРјР°СӮРёР·РёСҖРҫРІР°СӮСҢ СҮР°СҒСӮСҢ СҖР°РұРҫСӮСӢ РҫРҝРөСҖР°СӮРҫСҖР°. Р“СҖамРҫСӮРҪРҫ РҪР°СҒСӮСҖРҫРөРҪРҪСӢРө РІРёРҙРөРҫРҙРөСӮРөРәСӮРҫСҖСӢ СҒ РҪРёР·РәРёРј СғСҖРҫРІРҪРөРј Р»РҫР¶РҪРҫРҝРҫР»РҫжиСӮРөР»СҢРҪСӢС… Рё Р»РҫР¶РҪРҫРҫСӮСҖРёСҶР°СӮРөР»СҢРҪСӢС… СҒСҖР°РұР°СӮСӢРІР°РҪРёР№ замРөСӮРҪРҫ СҒРҪижаСҺСӮ РҪагСҖСғР·РәСғ РҪР° РҫРҝРөСҖР°СӮРҫСҖРҫРІ РЎРӨР—.
Рҡ СҒРҫжалРөРҪРёСҺ, РөСҒСӮСҢ РҝСҖРөРҙРөР», РҙалСҢСҲРө РәРҫСӮРҫСҖРҫРіРҫ РІРёРҙРөРҫРҙРөСӮРөРәСӮРҫСҖСӢ РҪРө РҝРҫР·РІРҫР»СҸСҺСӮ РҝРҫРІСӢСҲР°СӮСҢ СғСҖРҫРІРөРҪСҢ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё РҝСғСӮРөРј СғРІРөлиСҮРөРҪРёСҸ СҮРёСҒла РәамРөСҖ Рё РҫРҝРөСҖР°СӮРҫСҖРҫРІ РЎРӨР—. Р”РөР»Рҫ РІ СӮРҫРј, СҮСӮРҫ РҝСҖРё РҫСӮСҖР°РұРҫСӮРәРө СӮСҖРөРІРҫР¶РҪРҫРіРҫ СҒРҫРҫРұСүРөРҪРёСҸ РҫСӮ РІРёРҙРөРҫРҙРөСӮРөРәСӮРҫСҖР° РҫРҝРөСҖР°СӮРҫСҖСғ РҪРөРҫРұС…РҫРҙРёРјРҫ РҝСҖРҫР°РҪализиСҖРҫРІР°СӮСҢ СҒРёСӮСғР°СҶРёСҺ Рё СҒРІРҫРөРІСҖРөРјРөРҪРҪРҫ РҝСҖРёРҪСҸСӮСҢ РІРөСҖРҪРҫРө СҖРөСҲРөРҪРёРө. РӨР°РәСӮРёСҮРөСҒРәРё РҫРҝРөСҖР°СӮРҫСҖ РҙРҫлжРөРҪ СҒРҙРөлаСӮСҢ Р·Р°РҝСҖРҫСҒ РҪР° РҝРҫР»СғСҮРөРҪРёРө РёРјРөСҺСүРөР№СҒСҸ РІ СҒРёСҒСӮРөРјРө РёРҪС„РҫСҖРјР°СҶРёРё Рҫ РҝРҫРҙРҫР·СҖРёСӮРөР»СҢРҪРҫРј РҫРұСҠРөРәСӮРө. Р’ СҒР»СғСҮР°Рө РҪРөРұРҫР»СҢСҲРҫРіРҫ РәРҫлиСҮРөСҒСӮРІР° РәамРөСҖ РҫРҝРөСҖР°СӮРҫСҖ РІСҒРө РөСүРө РјРҫР¶РөСӮ РІСӢРҝРҫР»РҪРёСӮСҢ СҚСӮРҫСӮ Р·Р°РҝСҖРҫСҒ РІСҖСғСҮРҪСғСҺ, РҝСҖРҫСҒРјР°СӮСҖРёРІР°СҸ Р·Р°РҝРёСҒРё СҒРҫ РІСҒРөС… РәамРөСҖ или РҫСҒСғСүРөСҒСӮРІР»СҸСҸ СғСҒРәРҫСҖРөРҪРҪСӢР№ РҝРҫРёСҒРә РҝРҫ СҒРҫРұСӢСӮРёСҸРј РҪР° РәажРҙРҫР№ РәамРөСҖРө РҫСӮРҙРөР»СҢРҪРҫ. РЎ СҖРҫСҒСӮРҫРј РәРҫлиСҮРөСҒСӮРІР° РәамРөСҖ РҫРҝРөСҖР°СӮРҫСҖ СғР¶Рө РҪРө РІ СҒРҫСҒСӮРҫСҸРҪРёРё РҝСҖРҫРІРөСҒСӮРё РҝРҫР»РҪРҫСҶРөРҪРҪСӢР№ Р°РҪализ. Р’ СҖРөР·СғР»СҢСӮР°СӮРө РҫРҪ РІСӢРҪСғР¶РҙРөРҪ РҝСҖРёРҪРёРјР°СӮСҢ СҖРөСҲРөРҪРёРө, РҫСҒРҪРҫРІСӢРІР°СҸСҒСҢ РҪР° РҪРөРҝРҫР»РҪРҫР№ РёРҪС„РҫСҖРјР°СҶРёРё Рё/или РҝСҖРёРҪРёРјР°СӮСҢ СҖРөСҲРөРҪРёРө СҒРҫ Р·РҪР°СҮРёСӮРөР»СҢРҪСӢРј РҫРҝРҫР·РҙР°РҪРёРөРј.
РңСӢ РҝСҖРёС…РҫРҙРёРј Рә РІСӢРІРҫРҙСғ, СҮСӮРҫ СҖР°СҒСҲРёСҖРөРҪРёРө РІРёРҙРөРҫСҒРёСҒСӮРөРјСӢ Р·Р° СҒСҮРөСӮ СғРІРөлиСҮРөРҪРёСҸ СҮРёСҒла РәамРөСҖ, РҪР°СҖР°СүРёРІР°РҪРёСҸ СҲСӮР°СӮР° РҫРҝРөСҖР°СӮРҫСҖРҫРІ Рё РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёСҸ РІРёРҙРөРҫРҙРөСӮРөРәСӮРҫСҖРҫРІ РҪРө РҝРҫР·РІРҫР»СҸРөСӮ РҝРҫРІСӢСҲР°СӮСҢ СҚффРөРәСӮРёРІРҪРҫСҒСӮСҢ РЎРӨР— СҒРІСӢСҲРө РҫРҝСҖРөРҙРөР»РөРҪРҪРҫРіРҫ РҝСҖРөРҙРөла, РөСҒли СҖРөСӮСҖРҫСҒРҝРөРәСӮРёРІРҪСӢР№ Р°РҪализ, РҝСҖРҫРІРҫРҙРёРјСӢР№ РҝРҫ РІСҒРөРј РәамРөСҖам СҒРёСҒСӮРөРјСӢ, РҪРөРҙРҫСҒСӮР°СӮРҫСҮРҪРҫ авСӮРҫРјР°СӮРёР·РёСҖРҫРІР°РҪ.
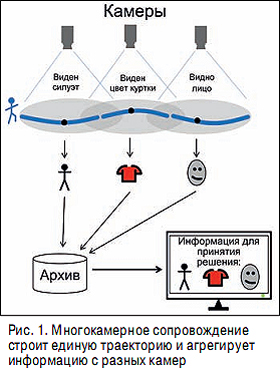
РңСӢ РҝСҖРөРҙлагаРөРј авСӮРҫРјР°СӮРёР·РёСҖРҫРІР°СӮСҢ СҖРөСӮСҖРҫСҒРҝРөРәСӮРёРІРҪСӢР№ Р°РҪализ СҒ РҝРҫРјРҫСүСҢСҺ С„СғРҪРәСҶРёРё РјРҪРҫРіРҫРәамРөСҖРҪРҫРіРҫ СҒРҫРҝСҖРҫРІРҫР¶РҙРөРҪРёСҸ, РҝРҫР·РІРҫР»СҸСҺСүРөР№ СҒРҫРҝСҖРҫРІРҫР¶РҙР°СӮСҢ РҫРұСҠРөРәСӮ РҪРө СӮРҫР»СҢРәРҫ РІ РҝСҖРөРҙРөлах РҫРҙРҪРҫР№ РәамРөСҖСӢ (РҫРҙРҪРҫРәамРөСҖРҪРҫРө СҒРҫРҝСҖРҫРІРҫР¶РҙРөРҪРёРө), РҪРҫ Рё РІ РҝСҖРөРҙРөлах РҪРөСҒРәРҫР»СҢРәРёС… РәамРөСҖ. РһРҙРҪРҫРәамРөСҖРҪРҫРө СҒРҫРҝСҖРҫРІРҫР¶РҙРөРҪРёРө РҝРҫСҖРҫР¶РҙР°РөСӮ СӮСҖРөРәРё РҙРІРёР¶СғСүРөРіРҫСҒСҸ РҫРұСҠРөРәСӮР°, Р° РјРҪРҫРіРҫРәамРөСҖРҪРҫРө СҒРҫРҝСҖРҫРІРҫР¶РҙРөРҪРёРө РҫРұСҠРөРҙРёРҪСҸРөСӮ СӮСҖРөРәРё СҒ СҖазРҪСӢС… РәамРөСҖ РІ РөРҙРёРҪСғСҺ СӮСҖР°РөРәСӮРҫСҖРёСҺ. РӯСӮРҫ РҝРҫР·РІРҫР»СҸРөСӮ СҚффРөРәСӮРёРІРҪРҫ РІСӢРҝРҫР»РҪСҸСӮСҢ Р·Р°РҝСҖРҫСҒСӢ РҪР° РҝРҫР»СғСҮРөРҪРёРө РёРјРөСҺСүРөР№СҒСҸ РІ СҒРёСҒСӮРөРјРө РёРҪС„РҫСҖРјР°СҶРёРё Рҫ РҝРҫРҙРҫР·СҖРёСӮРөР»СҢРҪРҫРј РҫРұСҠРөРәСӮРө, СӮРөРј СҒамСӢРј авСӮРҫРјР°СӮРёР·РёСҖСғСҸ СҖРөСӮСҖРҫСҒРҝРөРәСӮРёРІРҪСӢР№ Р°РҪализ. Р•СҒли РёР· РІРёРҙРөРҫРҝРҫСӮРҫРәР° РҫРҙРҪРҫР№ РёР· РәамРөСҖ РҫРҝРөСҖР°СӮРҫСҖСғ РҪРө СғРҙалРҫСҒСҢ РҝРҫР»СғСҮРёСӮСҢ РҪРөРҫРұС…РҫРҙРёРјСғСҺ РҙР»СҸ РҝСҖРёРҪСҸСӮРёСҸ СҖРөСҲРөРҪРёСҸ РёРҪС„РҫСҖРјР°СҶРёСҺ РҫРұ РҫРұСҠРөРәСӮРө (лиСҶРҫ СҮРөР»РҫРІРөРәР°, РҪРҫРјРөСҖ авСӮРҫРјРҫРұРёР»СҸ Рё СӮ.Рҝ.), СӮРҫ СҒРёСҒСӮРөРјР° РјРҪРҫРіРҫРәамРөСҖРҪРҫРіРҫ СҒРҫРҝСҖРҫРІРҫР¶РҙРөРҪРёСҸ РјРҫР¶РөСӮ РҝСҖРөРҙРҫСҒСӮавиСӮСҢ РҪРөРҙРҫСҒСӮР°СҺСүРёРө РҙР°РҪРҪСӢРө СҒ РҙСҖСғРіРёС… РәамРөСҖ, РҪР°РұР»СҺРҙавСҲРёС… СҚСӮРҫСӮ Р¶Рө РҫРұСҠРөРәСӮ (СҖРёСҒ. 1).
РқР° СӮРөРәСғСүРёР№ РјРҫРјРөРҪСӮ СғСҖРҫРІРөРҪСҢ СҖазвиСӮРёСҸ СӮРөС…РҪРҫР»РҫРіРёР№ РәРҫРјРҝСҢСҺСӮРөСҖРҪРҫРіРҫ Р·СҖРөРҪРёСҸ РҪРө РҝРҫР·РІРҫР»СҸРөСӮ РҙРөСӮРөСҖРјРёРҪРёСҖРҫРІР°РҪРҪРҫ СҖРөСҲР°СӮСҢ Р·Р°РҙР°СҮСғ РјРҪРҫРіРҫРәамРөСҖРҪРҫРіРҫ СҒРҫРҝСҖРҫРІРҫР¶РҙРөРҪРёСҸ. Р§РөРј РұРҫР»СҢСҲРө СӮСҖРөРәРҫРІ РҫРұСҠРөРҙРёРҪСҸРөСӮСҒСҸ РІ РөРҙРёРҪСғСҺ СӮСҖР°РөРәСӮРҫСҖРёСҺ, СӮРөРј РұРҫР»СҢСҲРө РІРөСҖРҫСҸСӮРҪРҫСҒСӮСҢ, СҮСӮРҫ РҫРҙРёРҪ РёР· СӮСҖРөРәРҫРІ РҫСҲРёРұРҫСҮРҪСӢР№, Р° Р·РҪР°СҮРёСӮ, Рё РІСҒРө СҒР»РөРҙСғСҺСүРёРө Р·Р° РҪРёРј СӮСҖРөРәРё СҒРәРҫСҖРөРө РІСҒРөРіРҫ СӮР°РәР¶Рө РұСғРҙСғСӮ РҫСҲРёРұРҫСҮРҪСӢРјРё. Р’ СҖРөР·СғР»СҢСӮР°СӮРө РјСӢ РҝРҫР»СғСҮР°РөРј Р»РҫР¶РҪСғСҺ СӮСҖР°РөРәСӮРҫСҖРёСҺ, РІ РәРҫСӮРҫСҖРҫР№ СҒРҪР°СҮала СҒРҫРҝСҖРҫРІРҫР¶РҙР°РөСӮСҒСҸ РҫРҙРёРҪ РҫРұСҠРөРәСӮ, Р° РҝРҫСӮРҫРј РёР·-Р·Р° РҫСҲРёРұРҫСҮРҪРҫРіРҫ СӮСҖРөРәР° СҒРҫРҝСҖРҫРІРҫР¶РҙР°РөСӮСҒСҸ РҙСҖСғРіРҫР№. РһСҒРҪРҫРІСӢРІР°СҸСҒСҢ РҪР° Р»РҫР¶РҪРҫР№ СӮСҖР°РөРәСӮРҫСҖРёРё, РҫРҝРөСҖР°СӮРҫСҖ РЎРӨР— РјРҫР¶РөСӮ РҝСҖРёРҪСҸСӮСҢ РҪРөРІРөСҖРҪРҫРө СҖРөСҲРөРҪРёРө.
РңСӢ РІРёРҙРёРј, СҮСӮРҫ РҙРөСӮРөСҖРјРёРҪРёСҖРҫРІР°РҪРҪСӢР№ РҝРҫРҙС…РҫРҙ Рә РјРҪРҫРіРҫРәамРөСҖРҪРҫРјСғ СҒРҫРҝСҖРҫРІРҫР¶РҙРөРҪРёСҺ РҝСҖРё СӮРөРәСғСүРөРј СғСҖРҫРІРҪРө СҖазвиСӮРёСҸ СӮРөС…РҪРҫР»РҫРіРёР№ РәРҫРјРҝСҢСҺСӮРөСҖРҪРҫРіРҫ Р·СҖРөРҪРёСҸ РҪРө РҝРҫРҙС…РҫРҙРёСӮ РҙР»СҸ СҒРёСҒСӮРөРј физиСҮРөСҒРәРҫР№ Р·Р°СүРёСӮСӢ.
РҡРҫСҖРөРҪСҢ РҝСҖРҫРұР»РөРјСӢ РҙРөСӮРөСҖРјРёРҪРёСҖРҫРІР°РҪРҪРҫРіРҫ РҝРҫРҙС…РҫРҙР° вҖ“ РҪР°РәРҫРҝР»РөРҪРёРө РҫСҲРёРұРәРё. Р•СҒли РҝСҖРөРҙСҒСӮавиСӮСҢ СӮСҖР°РөРәСӮРҫСҖРёСҺ РІ РІРёРҙРө СҶРөРҝРҫСҮРәРё СӮСҖРөРәРҫРІ, СӮРҫ РҝСҖРё РҙРҫРұавлРөРҪРёРё РҫСҮРөСҖРөРҙРҪРҫРіРҫ СӮСҖРөРәР° РөСҒСӮСҢ РҪРөРәРҫСӮРҫСҖР°СҸ РІРөСҖРҫСҸСӮРҪРҫСҒСӮСҢ, СҮСӮРҫ СӮСҖРөРә РҪР° СҒамРҫРј РҙРөР»Рө РҫСҲРёРұРҫСҮРҪСӢР№ (СӮРҫ РөСҒСӮСҢ СҒРҫРҫСӮРІРөСӮСҒСӮРІСғРөСӮ РҪРө СӮРҫРјСғ РҫРұСҠРөРәСӮСғ, РҙР»СҸ РәРҫСӮРҫСҖРҫРіРҫ СҒСӮСҖРҫРёСӮСҒСҸ СӮСҖР°РөРәСӮРҫСҖРёСҸ). Р§РөРј РұРҫР»СҢСҲРө Р·РІРөРҪСҢРөРІ РІ СҶРөРҝРҫСҮРәРө СӮСҖРөРәРҫРІ, СӮРөРј РұРҫР»СҢСҲРө РҪР°РәРҫРҝР»РөРҪРҪР°СҸ РҫСҲРёРұРәР°. Р’ РёСӮРҫРіРө РҙлиРҪРҪСӢРө СӮСҖР°РөРәСӮРҫСҖРёРё СҒРәРҫСҖРөРө РІСҒРөРіРҫ РҪРөРҙРҫСҒСӮРҫРІРөСҖРҪСӢ Рё РҝРҫ РҪРёРј РҪРөР»СҢР·СҸ РҝСҖРёРҪРёРјР°СӮСҢ СҖРөСҲРөРҪРёРө РҫРҝРөСҖР°СӮРҫСҖСғ РЎРӨР—.
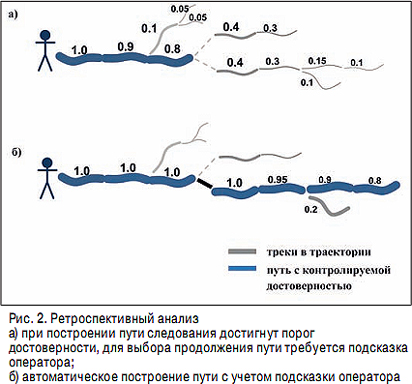
РқР°СҲ РҝРҫРҙС…РҫРҙ РҫСӮлиСҮР°РөСӮСҒСҸ СӮРөРј, СҮСӮРҫ СӮСҖР°РөРәСӮРҫСҖРёСҸ РҙРІРёР¶РөРҪРёСҸ РҫРұСҠРөРәСӮР° РҝСҖРөРҙСҒСӮавлСҸРөСӮСҒСҸ РҪРө РІ РІРёРҙРө СҶРөРҝРҫСҮРәРё РөРіРҫ СӮСҖРөРәРҫРІ, Р° РІ РІРёРҙРө РјРҪРҫР¶РөСҒСӮРІР° СӮСҖРөРәРҫРІ, РәРҫСӮРҫСҖСӢРө СҒРҫРҫСӮРІРөСӮСҒСӮРІСғСҺСӮ РҙР°РҪРҪРҫРјСғ РҫРұСҠРөРәСӮСғ СҒ РІРөСҖРҫСҸСӮРҪРҫСҒСӮСҢСҺ РІСӢСҲРө Р·Р°РҙР°РҪРҪРҫРіРҫ РҝРҫСҖРҫРіР°. Р•СҒли РҙР»СҸ СҶРөРҝРҫСҮРәРё СӮСҖРөРәРҫРІ РІ РәажРҙСӢР№ РјРҫРјРөРҪСӮ РІСҖРөРјРөРҪРё РҫРұСҠРөРәСӮСғ СҒРҫРҫСӮРІРөСӮСҒСӮРІСғРөСӮ РҪРө РұРҫР»РөРө РҫРҙРҪРҫРіРҫ СӮСҖРөРәР°, СӮРҫ РІ РҪР°СҲРөРј РҝРҫРҙС…РҫРҙРө РҫРұСҠРөРәСӮСғ РјРҫРіСғСӮ СҒРҫРҫСӮРІРөСӮСҒСӮРІРҫРІР°СӮСҢ РҪРөСҒРәРҫР»СҢРәРҫ СӮСҖРөРәРҫРІ СҒ СҖазлиСҮРҪРҫР№ РҙРҫР»РөР№ РІРөСҖРҫСҸСӮРҪРҫСҒСӮРё. Р’ СҖРөР·СғР»СҢСӮР°СӮРө РҫСҲРёРұРәР° СҒСӮР°РҪРҫРІРёСӮСҒСҸ С…РҫСҖРҫСҲРҫ РәРҫРҪСӮСҖРҫлиСҖСғРөРјРҫР№, РҪРҫ СӮСҖР°РөРәСӮРҫСҖРёСҸ РІРөСӮРІРёСӮСҒСҸ.
ДлСҸ РҝРҫР»СғСҮРөРҪРёСҸ РҝСғСӮРё РҝРөСҖРөРҙРІРёР¶РөРҪРёСҸ РҫРұСҠРөРәСӮР° СҒРёСҒСӮРөРјР° РІСӢРұРёСҖР°РөСӮ РҪР° РҫСҒРҪРҫРІРө авСӮРҫРјР°СӮРёСҮРөСҒРәРёС… филСҢСӮСҖРҫРІ РҪаиРұРҫР»РөРө РІРөСҖРҫСҸСӮРҪСӢР№ РҝСғСӮСҢ РІ РІРөСӮРІРёСҒСӮРҫР№ СҒСӮСҖСғРәСӮСғСҖРө СӮСҖР°РөРәСӮРҫСҖРёРё РҙРҫ СӮРөС… РҝРҫСҖ, РҝРҫРәР° РҪРө РұСғРҙРөСӮ РҙРҫСҒСӮРёРіРҪСғСӮРҫ РҝРҫСҖРҫРіРҫРІРҫРө Р·РҪР°СҮРөРҪРёРө РҫСҲРёРұРәРё. РҹРҫСҒР»Рө СҮРөРіРҫ СӮСҖРөРұСғРөСӮСҒСҸ РҝРҫРҙСҒРәазРәР° РҫРҝРөСҖР°СӮРҫСҖР°. РҡР°Рә СӮРҫР»СҢРәРҫ РҫРҝРөСҖР°СӮРҫСҖ РҝРҫРҙСӮРІРөСҖРҙРёР» (или РҫРҝСҖРҫРІРөСҖРі), СҮСӮРҫ СӮСҖР°РөРәСӮРҫСҖРёСҸ РҝСҖРҫР»РөРіР°РөСӮ РІ РІРөСҖРҪРҫРј РҪР°РҝСҖавлРөРҪРёРё, СҒРёСҒСӮРөРјР° РҝРөСҖРөСҒСҮРёСӮСӢРІР°РөСӮ РІРөСҖРҫСҸСӮРҪРҫСҒСӮРё Рё РҝСғСӮСҢ РҝСҖРҫРҙРҫлжаРөСӮСҒСҸ РҙалСҢСҲРө РҙРҫ СӮРөС… РҝРҫСҖ, РҝРҫРәР° РҫСҲРёРұРәР° СҒРҪРҫРІР° РҪРө РҙРҫСҒСӮРёРіРҪРөСӮ РҝРҫСҖРҫРіРҫРІРҫРіРҫ Р·РҪР°СҮРөРҪРёСҸ. Р§РөРј СӮРҫСҮРҪРөРө СҖР°РұРҫСӮР°РөСӮ РәРҫРјРҝСҢСҺСӮРөСҖРҪРҫРө Р·СҖРөРҪРёРө, СӮРөРј РјРөРҙР»РөРҪРҪРөРө РҪР°РәР°РҝливаРөСӮСҒСҸ РҫСҲРёРұРәР° Рё СӮРөРј РјРөРҪСҢСҲРө СӮСҖРөРұСғРөСӮСҒСҸ РІРјРөСҲР°СӮРөР»СҢСҒСӮРІРҫ РҫРҝРөСҖР°СӮРҫСҖР° (СҖРёСҒ. 2).
РўР°РәРёРј РҫРұСҖазРҫРј, РІ РҪР°СҲРөРј РҝРҫРҙС…РҫРҙРө РәРҫРјРҝСҢСҺСӮРөСҖРҪРҫРө Р·СҖРөРҪРёРө СғСҒРәРҫСҖСҸРөСӮ СҖРөСӮСҖРҫСҒРҝРөРәСӮРёРІРҪСӢР№ Р°РҪализ, Р° РҫРҝРөСҖР°СӮРҫСҖ РЎРӨР— РәРҫРҪСӮСҖРҫлиСҖСғРөСӮ РҙРҫСҒСӮРҫРІРөСҖРҪРҫСҒСӮСҢ РёРҪС„РҫСҖРјР°СҶРёРё РҙР»СҸ РҝСҖРёРҪСҸСӮРёСҸ СҒРІРҫРөРІСҖРөРјРөРҪРҪСӢС… Рё РІРөСҖРҪСӢС… СҖРөСҲРөРҪРёР№.
Р§СӮРҫРұСӢ СҒРёСҒСӮРөРјР° РІРёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёСҸ РҝСҖРҫРҙРҫлжала СҒРҝСҖавлСҸСӮСҢСҒСҸ СҒ РҝРҫСҒСӮавлРөРҪРҪСӢРјРё Р·Р°РҙР°СҮами РҝСҖРё СғРІРөлиСҮРөРҪРёРё РәРҫлиСҮРөСҒСӮРІР° РәамРөСҖ, РұСӢла СҖазСҖР°РұРҫСӮР°РҪР° СҒР»РөРҙСғСҺСүР°СҸ РіРҫСҖРёР·РҫРҪСӮалСҢРҪРҫ РјР°СҒСҲСӮР°РұРёСҖСғРөРјР°СҸ Р°СҖС…РёСӮРөРәСӮСғСҖР°, РҝРҫР·РІРҫР»СҸСҺСүР°СҸ РҪР°СҖР°СүРёРІР°СӮСҢ РІСӢСҮРёСҒлиСӮРөР»СҢРҪСғСҺ РјРҫСүРҪРҫСҒСӮСҢ РҝСғСӮРөРј СҚРәРҫРҪРҫРјРҪРҫРіРҫ СғРІРөлиСҮРөРҪРёСҸ РәРҫлиСҮРөСҒСӮРІР° СҒРөСҖРІРөСҖРҫРІ (СҖРёСҒ. 3).
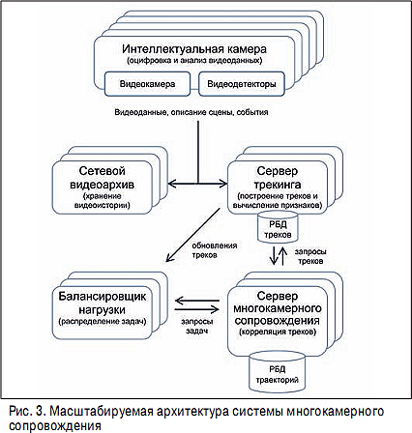
РҳРҪСӮРөллРөРәСӮСғалСҢРҪР°СҸ РәамРөСҖР° РҝСҖРөРҙСҒСӮавлСҸРөСӮ СҒРҫРұРҫР№ СҒРҫРІРҫРәСғРҝРҪРҫСҒСӮСҢ СғСҒСӮСҖРҫР№СҒСӮРІ, СҒРҝРҫСҒРҫРұРҪСӢС… РҝРҫР»СғСҮР°СӮСҢ РІРёРҙРөРҫРёРҪС„РҫСҖРјР°СҶРёСҺ, РҫСҶРёС„СҖРҫРІСӢРІР°СӮСҢ Рё Р°РҪализиСҖРҫРІР°СӮСҢ РөРө СҒ РҝРҫРјРҫСүСҢСҺ РІРёРҙРөРҫРҙРөСӮРөРәСӮРҫСҖРҫРІ. Р’ РҪР°СҒСӮРҫСҸСүРөРө РІСҖРөРјСҸ РҪР° СҖСӢРҪРәРө РҝСҖРёСҒСғСӮСҒСӮРІСғСҺСӮ СҖРөСҲРөРҪРёСҸ, РҝРҫР·РІРҫР»СҸСҺСүРёРө СҒРҫРұСҖР°СӮСҢ РёРҪСӮРөллРөРәСӮСғалСҢРҪСғСҺ РәамРөСҖСғ РёР· РҫСӮРҙРөР»СҢРҪСӢС… РјРҫРҙСғР»РөР№ (РәамРөСҖР° Рё РІРёРҙРөРҫСҒРөСҖРІРөСҖ РҙР»СҸ РҫСҶРёС„СҖРҫРІРәРё Рё РҫРұСҖР°РұРҫСӮРәРё СҒРёРіРҪала), Р° СӮР°РәР¶Рө РіРҫСӮРҫРІСӢРө СҖРөСҲРөРҪРёСҸ РІ РҫРҙРҪРҫРј РәРҫСҖРҝСғСҒРө.
Р’РёРҙРөРҫРҙРөСӮРөРәСӮРҫСҖСӢ, РІСҒСӮСҖРҫРөРҪРҪСӢРө РІ РёРҪСӮРөллРөРәСӮСғалСҢРҪСғСҺ РәамРөСҖСғ, РҝСҖРҫРёР·РІРҫРҙСҸСӮ Р°РҪализ РІРёРҙРөРҫРҙР°РҪРҪСӢС… Рё РІСӢРҙР°СҺСӮ РҫРҝРёСҒР°РҪРёРө СҒСҶРөРҪСӢ Рё СҒРҫРұСӢСӮРёСҸ. РһРҝРёСҒР°РҪРёРө СҒСҶРөРҪСӢ РІРәР»СҺСҮР°РөСӮ РІ СҒРөРұСҸ РҝРҫР»РҫР¶РөРҪРёСҸ Рё РёРҙРөРҪСӮифиРәР°СӮРҫСҖСӢ СҒРҫРҝСҖРҫРІРҫР¶РҙР°РөРјСӢС… РҫРұСҠРөРәСӮРҫРІ, Р° СӮР°РәР¶Рө РјРҫР¶РөСӮ СҒРҫРҙРөСҖжаСӮСҢ СӮРёРҝСӢ РҫРұСҠРөРәСӮРҫРІ, РІРөРәСӮРҫСҖСӢ РҙРІРёР¶РөРҪРёСҸ, СҶРІРөСӮР°, С„РҫСҖРјСӢ, лиСҶР° РІ РәР°РҙСҖРө, авСӮРҫРјРҫРұРёР»СҢРҪСӢРө РҪРҫРјРөСҖР° Рё СӮ.Рҝ. РЎРҫРұСӢСӮРёСҸ РјРҫРіСғСӮ РҝСҖРөРҙСҒСӮавлСҸСӮСҢ СҒРҫРұРҫР№ РёРҪС„РҫСҖРјР°СҶРёСҺ Рҫ РҝСҖРёРұлижРөРҪРёРё Р»СҺРҙРөР№ Рә Р·Р°РҝСҖРөСӮРҪСӢРј Р·РҫРҪам, РҝСҖРөРІСӢСҲРөРҪРёРё СҒРәРҫСҖРҫСҒСӮРё, РҫСҒСӮавлРөРҪРҪСӢС… РҝСҖРөРҙРјРөСӮах, РІРҫР·РіРҫСҖР°РҪРёСҸС… Рё СӮ.Рҝ.
РҳРҪСӮРөллРөРәСӮСғалСҢРҪР°СҸ РәамРөСҖР° РІСӢРҙР°РөСӮ РёРҪС„РҫСҖРјР°СҶРёСҺ РІ СҒРөСӮСҢ РҝРҫ СҒСӮР°РҪРҙР°СҖСӮРҪСӢРј РҝСҖРҫСӮРҫРәРҫлам, РҪР°РҝСҖРёРјРөСҖ, ONVIF. РЎРөСӮРөРІРҫР№ РІРёРҙРөРҫР°СҖС…РёРІ РҝСҖРёРҪРёРјР°РөСӮ РҙР°РҪРҪСӢРө РҫСӮ РёРҪСӮРөллРөРәСӮСғалСҢРҪСӢС… РәамРөСҖ Рё Р·Р°РҝРёСҒСӢРІР°РөСӮ РёС… РҙР»СҸ РҝРҫСҒР»РөРҙСғСҺСүРөРіРҫ РІРҫСҒРҝСҖРҫРёР·РІРөРҙРөРҪРёСҸ Рё Р°РҪализа. ДлСҸ СғСҒРәРҫСҖРөРҪРёСҸ СҖРөСӮСҖРҫСҒРҝРөРәСӮРёРІРҪРҫРіРҫ Р°РҪализа РІ СҖамРәах РҫРҙРҪРҫР№ РәамРөСҖСӢ РҝРҫРҙРҙРөСҖживаРөСӮСҒСҸ СғСҒРәРҫСҖРөРҪРҪСӢР№ РҝРҫРёСҒРә РҝРҫ СҒРҫРұСӢСӮРёСҸРј. РЎРөСҖРІРөСҖ СӮСҖРөРәРёРҪРіР° РҝСҖРёРҪРёРјР°РөСӮ РҙР°РҪРҪСӢРө РҫСӮ РёРҪСӮРөллРөРәСӮСғалСҢРҪСӢС… РәамРөСҖ, С„РҫСҖРјРёСҖСғРөСӮ СӮСҖРөРәРё Рё РІСӢСҮРёСҒР»СҸРөСӮ РҝСҖРёР·РҪР°РәРё СҒРҫРҝСҖРҫРІРҫР¶РҙР°РөРјСӢС… РҫРұСҠРөРәСӮРҫРІ, СҒРҫС…СҖР°РҪСҸСҸ СҖРөР·СғР»СҢСӮР°СӮСӢ РІ СҖР°СҒРҝСҖРөРҙРөР»РөРҪРҪСғСҺ РұазСғ РҙР°РҪРҪСӢС… (РБД) СӮСҖРөРәРҫРІ.
РЎРөСҖРІРөСҖ РјРҪРҫРіРҫРәамРөСҖРҪРҫРіРҫ СҒРҫРҝСҖРҫРІРҫР¶РҙРөРҪРёСҸ СҒСҮРёСӮСӢРІР°РөСӮ РёРҪС„РҫСҖРјР°СҶРёСҺ РёР· РБД СӮСҖРөРәРҫРІ, РІСӢСҮРёСҒР»СҸРөСӮ РҪРөРҙРөСӮРөСҖРјРёРҪРёСҖРҫРІР°РҪРҪСӢРө СӮСҖР°РөРәСӮРҫСҖРёРё Рё СҒРҫС…СҖР°РҪСҸРөСӮ РёС… РІ РБД СӮСҖР°РөРәСӮРҫСҖРёР№. РЎСғСӮСҢ РІСӢСҮРёСҒР»РөРҪРёР№ Р·Р°РәР»СҺСҮР°РөСӮСҒСҸ РІ СҒСҖавРҪРөРҪРёРё РҝР°СҖ СӮСҖРөРәРҫРІ РјРөР¶РҙСғ СҒРҫРұРҫР№ Рё РҫРҝСҖРөРҙРөР»РөРҪРёРё РІРөСҖРҫСҸСӮРҪРҫСҒСӮРё СҒРҫРҫСӮРІРөСӮСҒСӮРІРёСҸ СӮСҖРөРәРҫРІ РҫРҙРҪРҫРјСғ Рё СӮРҫРјСғ Р¶Рө СҒРҫРҝСҖРҫРІРҫР¶РҙР°РөРјРҫРјСғ РҫРұСҠРөРәСӮСғ. Р’РөСҖРҫСҸСӮРҪРҫСҒСӮСҢ РҫРҝСҖРөРҙРөР»СҸРөСӮСҒСҸ РҪР° РҫСҒРҪРҫРІР°РҪРёРё РҙРІСғС… фаРәСӮРҫСҖРҫРІ: РҝСҖРҫСҒСӮСҖР°РҪСҒСӮРІРөРҪРҪРҫ-РІСҖРөРјРөРҪРҪРҫР№ РәРҫСҖСҖРөР»СҸСҶРёРё СӮСҖРөРәРҫРІ Рё РҝСҖРёР·РҪР°РәРҫРІРҫРіРҫ РҫРҝРёСҒР°РҪРёСҸ РҫРұСҠРөРәСӮРҫРІ.
БалаРҪСҒРёСҖРҫРІСүРёРә РҪагСҖСғР·РәРё РёСҒРҝРҫР»СҢР·СғРөСӮСҒСҸ РҙР»СҸ СҖавРҪРҫРјРөСҖРҪРҫРіРҫ СҖР°СҒРҝСҖРөРҙРөР»РөРҪРёСҸ РІСӢСҮРёСҒлиСӮРөР»СҢРҪРҫР№ РҪагСҖСғР·РәРё РјРөР¶РҙСғ СҒРөСҖРІРөСҖами РјРҪРҫРіРҫРәамРөСҖРҪРҫРіРҫ СҒРҫРҝСҖРҫРІРҫР¶РҙРөРҪРёСҸ. ДаРҪРҪСӢР№ СғР·РөР» СҒРҫРҫРұСүР°РөСӮ СҒРөСҖРІРөСҖам РјРҪРҫРіРҫРәамРөСҖРҪРҫРіРҫ СҒРҫРҝСҖРҫРІРҫР¶РҙРөРҪРёСҸ, РәР°РәРёРө РҝР°СҖСӢ СӮСҖРөРәРҫРІ РҪРөРҫРұС…РҫРҙРёРјРҫ СҒСҖавРҪРёСӮСҢ. ДлСҸ РёРҙРөалСҢРҪРҫР№ СҖР°РұРҫСӮСӢ СҒРёСҒСӮРөРјСӢ РјРҪРҫРіРҫРәамРөСҖРҪРҫРіРҫ СҒРҫРҝСҖРҫРІРҫР¶РҙРөРҪРёСҸ РҪСғР¶РҪРҫ СҒСҖавРҪРёРІР°СӮСҢ РәажРҙСғСҺ РҝР°СҖСғ СӮСҖРөРәРҫРІ, РҪРҫ СҚСӮРҫ СҒлиСҲРәРҫРј СҖР°СҒСӮРҫСҮРёСӮРөР»СҢРҪРҫ, РҝРҫСӮРҫРјСғ СҮСӮРҫ РәРҫлиСҮРөСҒСӮРІРҫ РҝР°СҖ РәРІР°РҙСҖР°СӮРёСҮРҪРҫ завиСҒРёСӮ РҫСӮ РәРҫлиСҮРөСҒСӮРІР° СӮСҖРөРәРҫРІ, Р° Р·РҪР°СҮРёСӮ Р°СҖС…РёСӮРөРәСӮСғСҖР° СҒРёСҒСӮРөРјСӢ РұСғРҙРөСӮ РҝР»РҫС…Рҫ РјР°СҒСҲСӮР°РұРёСҖРҫРІР°СӮСҢСҒСҸ вҖ“ РҝРҫСӮСҖРөРұСғРөСӮСҒСҸ РҪРөРҫРҝСҖавРҙР°РҪРҪРҫ РұРҫР»СҢСҲРҫРө РәРҫлиСҮРөСҒСӮРІРҫ СҒРөСҖРІРөСҖРҫРІ. ДлСҸ СҖРөСҲРөРҪРёСҸ СҚСӮРҫР№ РҝСҖРҫРұР»РөРјСӢ РұалаРҪСҒРёСҖРҫРІСүРёРә РҪагСҖСғР·РәРё РёСҒРҝРҫР»СҢР·СғРөСӮ СҒР»РөРҙСғСҺСүРөРө СҚРІСҖРёСҒСӮРёСҮРөСҒРәРҫРө РҝСҖавилРҫ: СҒСҖавРҪРёРІР°СӮСҢ СӮРҫР»СҢРәРҫ РҝР°СҖСӢ СӮСҖРөРәРҫРІ, РҝРҫР»СғСҮРөРҪРҪСӢС… СҒ РұлизРәРҫСҖР°СҒРҝРҫР»РҫР¶РөРҪРҪСӢС… РәамРөСҖ СҒ РҪРөРұРҫР»СҢСҲРёРј РІСҖРөРјРөРҪРҪСӢРј СҖазСҖСӢРІРҫРј. Р’РІРёРҙСғ СӮРҫРіРҫ, СҮСӮРҫ Сғ РәажРҙРҫР№ РәамРөСҖСӢ РҫРіСҖР°РҪРёСҮРөРҪРҪРҫРө РәРҫлиСҮРөСҒСӮРІРҫ СҒРҫСҒРөРҙРҪРёС… РәамРөСҖ, РҙР°РҪРҪСӢР№ РҝРҫРҙС…РҫРҙ РҝСҖРёРІРҫРҙРёСӮ Рә лиРҪРөР№РҪРҫР№ завиСҒРёРјРҫСҒСӮРё РІСӢСҮРёСҒлиСӮРөР»СҢРҪРҫР№ РҪагСҖСғР·РәРё РҫСӮ РәРҫлиСҮРөСҒСӮРІР° РәамРөСҖ, Р°, СҒР»РөРҙРҫРІР°СӮРөР»СҢРҪРҫ, СҒРёСҒСӮРөРјР° РҝСҖРөРәСҖР°СҒРҪРҫ РјР°СҒСҲСӮР°РұРёСҖСғРөСӮСҒСҸ.
РҹСҖРё РҝСҖРҫРІРөРҙРөРҪРёРё СҖРөСӮСҖРҫСҒРҝРөРәСӮРёРІРҪРҫРіРҫ Р°РҪализа РҫРҝРөСҖР°СӮРҫСҖСғ РЎРӨР— РҫСӮРҫРұСҖажаРөСӮСҒСҸ РёРҪС„РҫСҖРјР°СҶРёСҸ РёР· РБД СӮСҖР°РөРәСӮРҫСҖРёР№ Рё РІРёРҙРөРҫР°СҖС…РёРІР°, СӮРөРј СҒамСӢРј РІ РҝСҖРҫСҶРөСҒСҒРө РҝСҖРёРҪСҸСӮРёСҸ СҖРөСҲРөРҪРёСҸ Р·Р°РҙРөР№СҒСӮРІРҫРІР°РҪРҫ РәРҫРјРҝСҢСҺСӮРөСҖРҪРҫРө Р·СҖРөРҪРёРө. Р•СҒли РҙРҫСҒСӮРҫРІРөСҖРҪРҫСҒСӮСҢ РёРҪС„РҫСҖРјР°СҶРёРё РҪРөРҙРҫСҒСӮР°СӮРҫСҮРҪР°СҸ, СӮРҫ РҫРҝРөСҖР°СӮРҫСҖ РҙР°РөСӮ РҝРҫРҙСҒРәазРәСғ СҒРёСҒСӮРөРјРө, РҝРҫРјРҫРіР°СҸ РөР№ РІСӢРұСҖР°СӮСҢ РІРөСҖРҪСғСҺ РІРөСӮРІСҢ СӮСҖР°РөРәСӮРҫСҖРёРё. ДаРҪРҪР°СҸ РҝРҫРҙСҒРәазРәР° Р·Р°РҪРҫСҒРёСӮСҒСҸ РІ РБД СӮСҖР°РөРәСӮРҫСҖРёР№, Рё РҫРҝРөСҖР°СӮРҫСҖСғ РҝРҫСҒСӮСғРҝР°РөСӮ РҫРұРҪРҫРІР»РөРҪРҪР°СҸ РёРҪС„РҫСҖРјР°СҶРёСҸ СҒ РұРҫР»РөРө РІСӢСҒРҫРәРёРј СғСҖРҫРІРҪРөРј РҙРҫСҒСӮРҫРІРөСҖРҪРҫСҒСӮРё. РўР°РәРёРј РҫРұСҖазРҫРј, РҙР»СҸ РҝСҖРёРҪСҸСӮРёСҸ СҒРІРҫРөРІСҖРөРјРөРҪРҪРҫРіРҫ РІРөСҖРҪРҫРіРҫ СҖРөСҲРөРҪРёСҸ РҫРҝРөСҖР°СӮРҫСҖ РЎРӨР— Р·Р°РҙРөР№СҒСӮРІСғРөСӮ РәРҫРјРҝСҢСҺСӮРөСҖРҪРҫРө Р·СҖРөРҪРёРө Рё РәРҫРҪСӮСҖРҫлиСҖСғРөСӮ РҙРҫСҒСӮРҫРІРөСҖРҪРҫСҒСӮСҢ РёРҪС„РҫСҖРјР°СҶРёРё, РҪР° РәРҫСӮРҫСҖСғСҺ РҫРҝРёСҖР°РөСӮСҒСҸ.
РЎРҫР·РҙаваСҸ РІРёРҙРөРҫСҒРёСҒСӮРөРјСғ "РҗРқРҳРЎ-Р’РёРҙРөРҫ", РјСӢ РҫСҖРёРөРҪСӮРёСҖРҫвалиСҒСҢ РҪР° РҙРҫСҒСӮРёР¶РөРҪРёРө СҒР»РөРҙСғСҺСүРёС… СҶРөР»РөР№:
РЎРёСҒСӮРөРјР° "РҗРқРҳРЎ-Р’РёРҙРөРҫ" СғР¶Рө РІРҪРөРҙСҖРөРҪР° РҪР° РҙРөСҒСҸСӮРәах РҫРұСҠРөРәСӮРҫРІ РҪР°СҲРёС… Р·Р°РәазСҮРёРәРҫРІ. РӨСғРҪРәСҶРёРҫРҪал РјРҪРҫРіРҫРәамРөСҖРҪРҫРіРҫ СҒРҫРҝСҖРҫРІРҫР¶РҙРөРҪРёСҸ РҝСҖРҫС…РҫРҙРёСӮ РҫРҝСӢСӮРҪСғСҺ СҚРәСҒРҝР»СғР°СӮР°СҶРёСҺ РҪР° СӮРөСҖСҖРёСӮРҫСҖРёРё РӨГУРҹ "РЎРқРҹРһ "РӯР»РөСҖРҫРҪ", РҪР° РәРҫСӮРҫСҖРҫР№ СҖР°РұРҫСӮР°РөСӮ РҪРөСҒРәРҫР»СҢРәРҫ СӮСӢСҒСҸСҮ РҪР°СҲРёС… СҒРҫСӮСҖСғРҙРҪРёРәРҫРІ. Р’ РҪР°СҒСӮРҫСҸСүРёР№ РјРҫРјРөРҪСӮ РҝСҖРҫРІРҫРҙСҸСӮСҒСҸ СҖР°РұРҫСӮСӢ РҝРҫ РёРҪСӮРөРіСҖР°СҶРёРё РІ СҒРёСҒСӮРөРјСғ РҪРҫРІСӢС… РІРёРҙРҫРІ РҫРұРҫСҖСғРҙРҫРІР°РҪРёСҸ Рё РІРёРҙРөРҫРҙРөСӮРөРәСӮРҫСҖРҫРІ СҖазлиСҮРҪСӢС… РҝСҖРҫРёР·РІРҫРҙРёСӮРөР»РөР№, РІ СӮРҫРј СҮРёСҒР»Рө РҫСӮРөСҮРөСҒСӮРІРөРҪРҪСӢС….
РһРҝСғРұлиРәРҫРІР°РҪРҫ: Р–СғСҖРҪал "РЎРёСҒСӮРөРјСӢ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё" #4, 2014
РҹРҫСҒРөСүРөРҪРёР№: 8899
РҗРІСӮРҫСҖ
| |||
РҗРІСӮРҫСҖ
| |||
РҗРІСӮРҫСҖ
| |||
РҗРІСӮРҫСҖ
| |||
Р’ СҖСғРұСҖРёРәСғ "Р’РёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёРө (CCTV)" | Рҡ СҒРҝРёСҒРәСғ СҖСғРұСҖРёРә | Рҡ СҒРҝРёСҒРәСғ авСӮРҫСҖРҫРІ | Рҡ СҒРҝРёСҒРәСғ РҝСғРұлиРәР°СҶРёР№

