






Р’ СҖСғРұСҖРёРәСғ "Р’РёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёРө (CCTV)" | Рҡ СҒРҝРёСҒРәСғ СҖСғРұСҖРёРә | Рҡ СҒРҝРёСҒРәСғ авСӮРҫСҖРҫРІ | Рҡ СҒРҝРёСҒРәСғ РҝСғРұлиРәР°СҶРёР№

Р’СӢРҙРөР»СҸСҺСӮ РҙРІР° РәлаСҒСҒР° алгРҫСҖРёСӮРјРҫРІ, РҝРҫР·РІРҫР»СҸСҺСүРёС… СҖРөСҲРёСӮСҢ Р·Р°РҙР°СҮСғ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РҫСҒСӮавлРөРҪРҪСӢС… РҝСҖРөРҙРјРөСӮРҫРІ:
Р Р°СҒСҒРјРҫСӮСҖРёРј СҚСӮРё РәлаСҒСҒСӢ РҝРҫРҙСҖРҫРұРҪРөРө.
ДаРҪРҪСӢР№ РјРөСӮРҫРҙ РёСҒРҝРҫР»СҢР·СғРөСӮ РҙРІРө РјРҫРҙРөли С„РҫРҪР°: РәСҖР°СӮРәРҫСҒСҖРҫСҮРҪСғСҺ (РұСӢСҒСӮСҖРҫ РјРөРҪСҸСҺСүСғСҺСҒСҸ, РұСӢСҒСӮСҖСғСҺ) Рё РҙРҫлгРҫСҒСҖРҫСҮРҪСғСҺ (РјРөРҙР»РөРҪРҪРҫ РјРөРҪСҸСҺСүСғСҺСҒСҸ, РҙРҫлгСғСҺ), РәажРҙР°СҸ РёР· РҪРёС… РёРјРөРөСӮ СҒРІРҫСҺ СҒРәРҫСҖРҫСҒСӮСҢ Рё РІСҖРөРјСҸ РҫРұРҪРҫРІР»РөРҪРёСҸ.
Р’СҖРөРјСҸ РҫРұРҪРҫРІР»РөРҪРёСҸ РәСҖР°СӮРәРҫСҒСҖРҫСҮРҪРҫР№ РјРҫРҙРөли С„РҫРҪР° малРҫ, СӮРҫ РөСҒСӮСҢ РІСҒРө РёР·РјРөРҪРөРҪРёСҸ СӮРөРәСғСүРөРіРҫ РәР°РҙСҖР° РҝРҫ СҒСҖавРҪРөРҪРёСҺ СҒ РҝСҖРөРҙСӢРҙСғСүРёРјРё РҫСҮРөРҪСҢ РұСӢСҒСӮСҖРҫ фиРәСҒРёСҖСғСҺСӮСҒСҸ РІ РјРөРҪСҸСҺСүРөРјСҒСҸ РәСҖР°СӮРәРҫСҒСҖРҫСҮРҪРҫРј С„РҫРҪРө. Р•СҒли РІ РәР°РҙСҖРө РҝРҫСҸРІРёР»СҒСҸ РҪРҫРІСӢР№ РҫРұСҠРөРәСӮ РІ РҙРІРёР¶РөРҪРёРё, РҫРҪ РҪРө СҒСӮР°РҪРөСӮ С„РҫРҪРҫРј, РҪРҫ РөСҒли РҫРұСҠРөРәСӮ РҫСҒСӮР°РҪРҫРІРёР»СҒСҸ Рё СҒСӮал РҪРөРҝРҫРҙРІРёР¶РҪСӢРј (Р° СҚСӮРҫ СҮР°СүРө РІСҒРөРіРҫ Рё РөСҒСӮСҢ РҫСҒСӮавлРөРҪРҪСӢР№ РҝСҖРөРҙРјРөСӮ), РҫРҪ РҫРұСҠРөРҙРёРҪРёСӮСҒСҸ СҒ РҪРөРҝРҫРҙРІРёР¶РҪСӢРј С„РҫРҪРҫРј РәР°РҙСҖР°. РўР°РәРёРј РҫРұСҖазРҫРј, РәСҖР°СӮРәРҫСҒСҖРҫСҮРҪСӢР№ С„РҫРҪ РҝРҫР·РІРҫР»СҸРөСӮ РҫРҝСҖРөРҙРөлиСӮСҢ, СҮСӮРҫ РІ РәР°РҙСҖРө РҝСҖРёСҒСғСӮСҒСӮРІРҫвалРҫ РҙРІРёР¶РөРҪРёРө (РҪахРҫРҙРёР»СҒСҸ РҙРІРёР¶СғСүРёР№СҒСҸ РҫРұСҠРөРәСӮ), Р° СҒРөР№СҮР°СҒ СҚСӮРҫРіРҫ РҙРІРёР¶РөРҪРёСҸ РҪРөСӮ (РҫРұСҠРөРәСӮ СҒСӮал СҒСӮР°СӮРёСҮРҪСӢРј Рё СҒлилСҒСҸ СҒ С„РҫРҪРҫРј). РҳСҒРҝРҫР»СҢР·РҫРІР°РҪРёРө СӮРҫР»СҢРәРҫ РәСҖР°СӮРәРҫСҒСҖРҫСҮРҪРҫР№ РјРҫРҙРөли РҪРөРІРҫР·РјРҫР¶РҪРҫ, СӮР°Рә РәР°Рә РҪРөРҝРҫРҙРІРёР¶РҪСӢР№ РҫРұСҠРөРәСӮ (РҝСҖРөРҙРҝРҫР»РҫжиСӮРөР»СҢРҪРҫ РҫСҒСӮавлРөРҪРҪСӢР№ РҝСҖРөРҙРјРөСӮ) РҫСҮРөРҪСҢ РұСӢСҒСӮСҖРҫ "РёСҒСҮРөР·Р°РөСӮ", РҫРұСҠРөРҙРёРҪСҸРөСӮСҒСҸ СҒ С„РҫРҪРҫРј, Рё РҫСӮСҒР»РөРҙРёСӮСҢ РІСҖРөРјСҸ РөРіРҫ РҝРҫРәРҫСҸ РҪРөРІРҫР·РјРҫР¶РҪРҫ. РҹРҫСҚСӮРҫРјСғ РҫРҙРҪРҫРІСҖРөРјРөРҪРҪРҫ СҒ РәСҖР°СӮРәРҫСҒСҖРҫСҮРҪРҫР№ алгРҫСҖРёСӮРј РҝСҖРёРјРөРҪСҸРөСӮ РҙРҫлгРҫСҒСҖРҫСҮРҪСғСҺ РјРҫРҙРөР»СҢ С„РҫРҪР°. Р”РҫлгРҫСҒСҖРҫСҮРҪР°СҸ РјРҫРҙРөР»СҢ С„РҫРҪР° РјРөРҪСҸРөСӮСҒСҸ РіРҫСҖазРҙРҫ РјРөРҙР»РөРҪРҪРөРө, РҪРҫРІСӢРө РҫРұСҠРөРәСӮСӢ, РҝРҫРҝР°РҙР°СҸ РІ РҪРөРө, РөСүРө РҪРөРәРҫСӮРҫСҖРҫРө РІСҖРөРјСҸ РҫСҒСӮР°СҺСӮСҒСҸ РҝРөСҖРөРҙРҪРёРј РҝлаРҪРҫРј Рё СӮРҫР»СҢРәРҫ СҮРөСҖРөР· РҝСҖРҫРҙРҫлжиСӮРөР»СҢРҪРҫРө РІСҖРөРјСҸ СҒСӮР°РҪРҫРІСҸСӮСҒСҸ С„РҫРҪРҫРј. Р”РҫлгаСҸ РјРҫРҙРөР»СҢ С„РҫРҪР° РёСҒРҝРҫР»СҢР·СғРөСӮСҒСҸ РҙР»СҸ СӮРҫРіРҫ, СҮСӮРҫРұСӢ РҙРөСӮРөРәСӮРёСҖРҫРІР°СӮСҢ РҫСҒСӮавлРөРҪРҪСӢР№ РҫРұСҠРөРәСӮ, РҫСҶРөРҪРёСӮСҢ, СҮСӮРҫ РҫРҪ РҝРҫРҝал РІ СҒСҶРөРҪСғ РҪРөРәРҫСӮРҫСҖРҫРө РІСҖРөРјСҸ РҪазаРҙ, Р° РҪРө СҸРІР»СҸР»СҒСҸ РёСҒС…РҫРҙРҪСӢРј С„РҫРҪРҫРј.
РһРҝРөСҖР°СӮРҫСҖ СҒРёСҒСӮРөРјСӢ РјРҫР¶РөСӮ Р·Р°РҙР°СӮСҢ РІСҖРөРјСҸ, СҮРөСҖРөР· РәРҫСӮРҫСҖРҫРө РҝСҖРөРҙРјРөСӮ РұСғРҙРөСӮ СҒСҮРёСӮР°СӮСҢСҒСҸ РҫСҒСӮавлРөРҪРҪСӢРј. РҹРҫР»СғСҮРёРІ СҚСӮРё РҙР°РҪРҪСӢРө, СҒРёСҒСӮРөРјР° РІСӢСҮРёСҒлиСӮ РәРҫСҚффиСҶРёРөРҪСӮ, РәРҫСӮРҫСҖСӢР№ СҒРәРҫСҖСҖРөРәСӮРёСҖСғРөСӮ РІСҖРөРјСҸ РҫРұРҪРҫРІР»РөРҪРёСҸ РҙРҫлгРҫСҒСҖРҫСҮРҪРҫРіРҫ С„РҫРҪР°.
РӣРҫРіРёРәР° СҖР°РұРҫСӮСӢ РјРөСӮРҫРҙР° РҝСҖРөРҙСҒСӮавлРөРҪР° РҪР° СҖРёСҒ. 1.

РҡажРҙСӢР№ РҝРёРәСҒРөР»СҢ СӮРөРәСғСүРөРіРҫ РәР°РҙСҖР° СҒСҖавРҪРёРІР°РөСӮСҒСҸ СҒ СҒРҫРҫСӮРІРөСӮСҒСӮРІСғСҺСүРёРјРё РҝРёРәСҒРөР»СҸРјРё РҙРҫлгРҫСҒСҖРҫСҮРҪРҫРіРҫ Рё РәСҖР°СӮРәРҫСҒСҖРҫСҮРҪРҫРіРҫ С„РҫРҪРҫРІ. ДалРөРө РІ завиСҒРёРјРҫСҒСӮРё РҫСӮ СҖРөР·СғР»СҢСӮР°СӮР° СҒСҖавРҪРөРҪРёСҸ СҒСӮСҖРҫРёСӮСҒСҸ РіРёРҝРҫСӮРөР·Р°.
РҹСҖРё РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёРё алгРҫСҖРёСӮРјРҫРІ СӮСҖРөРәРёРҪРіР° РҙР»СҸ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РҫСҒСӮавлРөРҪРҪСӢС… РҝСҖРөРҙРјРөСӮРҫРІ СҒРёСҒСӮРөРјР° РҙРөСӮРөРәСӮРёСҖСғРөСӮ РәР°Рә РҝСҖРөРҙРјРөСӮ, СӮР°Рә Рё СҮРөР»РҫРІРөРәР°, РәРҫСӮРҫСҖСӢР№ РҫСҒСӮавил СҚСӮРҫСӮ РҝСҖРөРҙРјРөСӮ, Р° СӮРҫСҮРҪРөРө, СҒРёСҒСӮРөРјР° РҙРөСӮРөРәСӮРёСҖСғРөСӮ СҖазРҙРөР»РөРҪРёРө РҫРҙРҪРҫРіРҫ РҙРІРёР¶СғСүРөРіРҫСҒСҸ РҫРұСҠРөРәСӮР° РҪР° РҙРІР°: СҒСӮР°СӮРёСҮРҪСӢР№ Рё РҙРІРёР¶СғСүРёР№СҒСҸ, Р·Р°СӮРөРј СҒР»РөРҙРёСӮ Р·Р° СҒСӮР°СӮРёСҮРҪСӢРј РҫРұСҠРөРәСӮРҫРј.
Р’ РҝРҫРҙС…РҫРҙРө СҒ РҝСҖРёРјРөРҪРөРҪРёРөРј СӮСҖРөРәРёРҪРіР° СӮР°РәР¶Рө РҝРөСҖРІСӢРј СҲагРҫРј СҸРІР»СҸРөСӮСҒСҸ РІСӢРҙРөР»РөРҪРёРө С„РҫРҪР°. ДалРөРө СҒРёСҒСӮРөРјР° СҒСӮСҖРҫРёСӮ СӮСҖР°РөРәСӮРҫСҖРёРё РІСҒРөС… РҙРІРёР¶СғСүРёС…СҒСҸ РҫРұСҠРөРәСӮРҫРІ РІ РәР°РҙСҖРө, Р° Р·Р°СӮРөРј фиРәСҒРёСҖСғРөСӮ "СҖазРҙРөР»РөРҪРёРө" РҙРІРёР¶СғСүРөРіРҫСҒСҸ РҫРұСҠРөРәСӮР° РҪР° РҙРІР°, РҫРҙРёРҪ РёР· РәРҫСӮРҫСҖСӢС… РҝСҖРҫРҙРҫлжаРөСӮ РҙРІРёР¶РөРҪРёРө, Р° РҙСҖСғРіРҫР№ РҫСҒСӮР°РөСӮСҒСҸ СҒСӮР°СӮРёСҮРҪСӢРј. РҹСҖРҫРіСҖамма Р°РҪализиСҖСғРөСӮ СҒРәРҫСҖРҫСҒСӮРё, РҪР°РҝСҖавлРөРҪРёСҸ РҙРІРёР¶РөРҪРёСҸ РҫРұСҠРөРәСӮРҫРІ, РёС… СҶРІРөСӮРҫРІСӢРө С…Р°СҖР°РәСӮРөСҖРёСҒСӮРёРәРё, Р·Р°СӮРөРј СҚСӮРё РҙР°РҪРҪСӢРө РҝРҫРјРҫРіР°СҺСӮ РІ СҒРҫРҝРҫСҒСӮавлРөРҪРёРё РҝСҖРөРҙРјРөСӮР° Рё СҮРөР»РҫРІРөРәР° РҝСҖРё РёС… "СҖазРҙРөР»РөРҪРёРё" РҪР° РҙРІР° РҫРұСҠРөРәСӮР°.
РҡажРҙСӢР№ РёР· РјРөСӮРҫРҙРҫРІ (алгРҫСҖРёСӮРјРҫРІ) РёРјРөРөСӮ РәР°Рә РҝСҖРөРёРјСғСүРөСҒСӮРІР°, СӮР°Рә Рё СҒлаРұСӢРө РјРөСҒСӮР°.
Р Р°РұРҫСӮР° РІ СӮРҫР»РҝРө
РҗлгРҫСҖРёСӮРјСӢ, РҫСҒРҪРҫРІР°РҪРҪСӢРө РҪР° РҝРҫРёСҒРәРө РҫРұСҠРөРәСӮРҫРІ РҝРөСҖРөРҙРҪРөРіРҫ РҝлаРҪР°, РІ СҚСӮРҫР№ СҒРёСӮСғР°СҶРёРё РҝРҫРәазСӢРІР°СҺСӮ РІСӢСҒРҫРәРёРө СҖРөР·СғР»СҢСӮР°СӮСӢ РҝСҖРё РәРҫСҖСҖРөРәСӮРҪРҫР№ СғСҒСӮР°РҪРҫРІРәРө РёСҒСӮРёРҪРҪРҫРіРҫ С„РҫРҪР°. РӯСӮРҫ РІРҫР·РјРҫР¶РҪРҫ РІ СӮРҫРј СҒР»СғСҮР°Рө, РәРҫРіРҙР° С„РҫРҪ РҝРҫРҝР°РҙР°РөСӮ РІ РәР°РҙСҖ РҝРҫР»РҪРҫСҒСӮСҢСҺ РҪР° РҪРөРәРҫСӮРҫСҖРҫРө РІСҖРөРјСҸ, СӮРҫ РөСҒСӮСҢ С„РҫРҪ РҪРө РІСҒРө РІСҖРөРјСҸ СҒСҠРөРјРәРё РҝРөСҖРөРәСҖСӢРІР°РөСӮСҒСҸ СӮРҫР»РҝРҫР№. ДлСҸ РјРөСӮРҫРҙР°, РёСҒРҝРҫР»СҢР·СғСҺСүРөРіРҫ алгРҫСҖРёСӮРјСӢ СӮСҖРөРәРёРҪРіР°, РҝСҖРё СҖР°РұРҫСӮРө РІ СӮРҫР»РҝРө РІРҫР·РҪРёРәР°СҺСӮ СҒР»РҫР¶РҪРҫСҒСӮРё СҒ РІСӢРҙРөР»РөРҪРёРөРј РҫСӮРҙРөР»СҢРҪРҫРіРҫ РҙРІРёР¶СғСүРөРіРҫСҒСҸ РҫРұСҠРөРәСӮР°.
Р РөСҒСғСҖСҒРҫРөРјРәРҫСҒСӮСҢ
РЎР»РҫР¶РҪРҫСҒСӮСҢ РҝСҖРҫСҶРөСҒСҒРҫРІ РҫРұСҖР°РұРҫСӮРәРё РёРҪС„РҫСҖРјР°СҶРёРё Рё, РәР°Рә СҒР»РөРҙСҒСӮРІРёРө, СҖРөСҒСғСҖСҒРҫРөРјРәРҫСҒСӮСҢ РјРөСӮРҫРҙР°, РёСҒРҝРҫР»СҢР·СғСҺСүРөРіРҫ СӮСҖРөРәРёРҪРі, РІСӢСҲРө. РЎРёСҒСӮРөРјРө РҪРөРҫРұС…РҫРҙРёРјРҫ РҫРҝСҖРөРҙРөлиСӮСҢ С„РҫРҪ, РҙРөСӮРөРәСӮРёСҖРҫРІР°СӮСҢ РҙРІРёР¶СғСүРёРөСҒСҸ РҫРұСҠРөРәСӮСӢ, РІСӢРҙРөлиСӮСҢ С…Р°СҖР°РәСӮРөСҖРёСҒСӮРёРәРё РҙРІРёР¶РөРҪРёСҸ Рё РҫРұСҠРөРәСӮРҫРІ (СҶРІРөСӮРҫРІСӢРө С…Р°СҖР°РәСӮРөСҖРёСҒСӮРёРәРё, СҒРәРҫСҖРҫСҒСӮСҢ, РҪР°РҝСҖавлРөРҪРёРө РҙРІРёР¶РөРҪРёСҸ), СҖР°СҒСҒСҮРёСӮР°СӮСҢ РІРөСҖРҫСҸСӮРҪРҫСҒСӮСҢ РҝРөСҖРөС…РҫРҙР° РҫРұСҠРөРәСӮР° РёР· РҫРҙРҪРҫР№ СӮРҫСҮРәРё РҝСҖРөРҙСӢРҙСғСүРөРіРҫ РәР°РҙСҖР° РІ РҙСҖСғРіСғСҺ СӮРҫСҮРәСғ СӮРөРәСғСүРөРіРҫ РәР°РҙСҖР° РҙР»СҸ РІРөСҖРҪРҫРіРҫ РҝСҖРёСҒРІРҫРөРҪРёСҸ СӮСҖР°РөРәСӮРҫСҖРёРё РҝРөСҖРөРјРөСүРөРҪРёСҸ РҝСҖРё РҫРҙРҪРҫРІСҖРөРјРөРҪРҪРҫРј РҙРІРёР¶РөРҪРёРё РІ РәР°РҙСҖРө РҪРөСҒРәРҫР»СҢРәРёС… РҫРұСҠРөРәСӮРҫРІ. РқР° РҝСҖРҫРІРөРҙРөРҪРёРө РІСҒРөС… СҚСӮРёС… РҝРҫРҙСҒСҮРөСӮРҫРІ СӮСҖРөРұСғСҺСӮСҒСҸ РұРҫР»СҢСҲРёРө РІСӢСҮРёСҒлиСӮРөР»СҢРҪСӢРө РјРҫСүРҪРҫСҒСӮРё.

РҹСҖРҫРҝСғСҒРәРё РҫСҒСӮавлРөРҪРҪСӢС… РҝСҖРөРҙРјРөСӮРҫРІ
ДлСҸ РјРөСӮРҫРҙР°, РҫСҒРҪРҫРІР°РҪРҪРҫРіРҫ РҪР° РҝРҫРёСҒРәРө РҫРұСҠРөРәСӮРҫРІ РҝРөСҖРөРҙРҪРөРіРҫ РҝлаРҪР°, СҒР»РҫР¶РҪРҫСҒСӮРё РІРҫР·РҪРёРәР°СҺСӮ РҝСҖРё РҪРөРІРҫР·РјРҫР¶РҪРҫСҒСӮРё РәРҫСҖСҖРөРәСӮРҪРҫРіРҫ РҫРҝСҖРөРҙРөР»РөРҪРёСҸ С„РҫРҪР° (РҝСҖРё СҖР°РұРҫСӮРө РІ СӮРҫР»РҝРө, РҝСҖРё СҖР°РұРҫСӮРө РІ СғСҒР»РҫРІРёСҸС… СҮР°СҒСӮРёСҮРҪРҫРіРҫ РёР·РјРөРҪРөРҪРёСҸ РҫСҒРІРөСүРөРҪРҪРҫСҒСӮРё). ДлСҸ РјРөСӮРҫРҙР°, РҫСҒРҪРҫРІР°РҪРҪРҫРіРҫ РҪР° СӮСҖРөРәРёРҪРіРө, СҒР»РҫР¶РҪСӢРјРё СҸРІР»СҸСҺСӮСҒСҸ СҒСҶРөРҪСӢ СҒ РІСӢСҒРҫРәРҫР№ РёРҪСӮРөРҪСҒРёРІРҪРҫСҒСӮСҢСҺ РҙРІРёР¶РөРҪРёСҸ, РҝРөСҖРөРәСҖСӢСӮРёСҸРјРё РҙРІРёР¶СғСүРёС…СҒСҸ РҫРұСҠРөРәСӮРҫРІ РҙСҖСғРіРёРјРё РҫРұСҠРөРәСӮами, РІСҖРөРјРөРҪРҪРҫР№ РҝРҫСӮРөСҖРөР№ РҫРұСҠРөРәСӮР° РёР· РҝРҫР»СҸ Р·СҖРөРҪРёСҸ РәамРөСҖСӢ.
РӣРҫР¶РҪСӢРө СҒСҖР°РұР°СӮСӢРІР°РҪРёСҸ
ДлСҸ РҙРІСғС… РјРөСӮРҫРҙРҫРІ Р»РҫР¶РҪСӢРө СҒСҖР°РұР°СӮСӢРІР°РҪРёСҸ РІРҫР·РјРҫР¶РҪСӢ РҝСҖРё Р·Р°РҙРөСҖР¶РәРө СҮРөР»РҫРІРөРәР° РІ РәР°РҙСҖРө РҪР° РІСҖРөРјСҸ, СҖавРҪРҫРө РІСҖРөРјРөРҪРё, СҮРөСҖРөР· РәРҫСӮРҫСҖРҫРө РҝСҖРөРҙРјРөСӮ РұСғРҙРөСӮ СҒСҮРёСӮР°СӮСҢСҒСҸ РҫСҒСӮавлРөРҪРҪСӢРј. РһРұСҠСҸСҒРҪСҸРөСӮСҒСҸ СҚСӮРҫ СӮРөРј, СҮСӮРҫ СҒРёСҒСӮРөРјР° РҪРө РІ СҒилах РҫСӮлиСҮРёСӮСҢ СҮРөР»РҫРІРөРәР° (РҫСҒРҫРұРөРҪРҪРҫ РөСҒли РҫРҪ РҝСҖРёРҪРёРјР°РөСӮ РҝРҫР·Сғ, РІ РәРҫСӮРҫСҖРҫР№ РҝСҖРҫРіСҖаммРө СҒР»РҫР¶РҪРҫ РөРіРҫ РёРҙРөРҪСӮифиСҶРёСҖРҫРІР°СӮСҢ, РҪР°РҝСҖРёРјРөСҖ СҒР°РҙРёСӮСҒСҸ) РҫСӮ РҝРҫСӮРөРҪСҶиалСҢРҪРҫ РёРҪСӮРөСҖРөСҒСғСҺСүРөРіРҫ РҫРұСҠРөРәСӮР°. Р‘РҫСҖРҫСӮСҢСҒСҸ СҒ РҙР°РҪРҪРҫР№ СҒР»РҫР¶РҪРҫСҒСӮСҢСҺ РјРҫР¶РҪРҫ СҒ РҝРҫРјРҫСүСҢСҺ РҫРұСҠРөРҙРёРҪРөРҪРёСҸ РҙРөСӮРөРәСӮРҫСҖР° СҒ РәлаСҒСҒифиРәР°СӮРҫСҖРҫРј, СҒРҝРҫСҒРҫРұРҪСӢРј СҖР°СҒРҝРҫР·РҪаваСӮСҢ РәР°СӮРөРіРҫСҖРёРё РҫРұСҠРөРәСӮРҫРІ Рё РҫСӮлиСҮР°СӮСҢ СҮРөР»РҫРІРөРәР° РІ Р»СҺРұРҫРј РҝРҫР»РҫР¶РөРҪРёРё РҫСӮ РҝСҖРөРҙРјРөСӮРҫРІ.
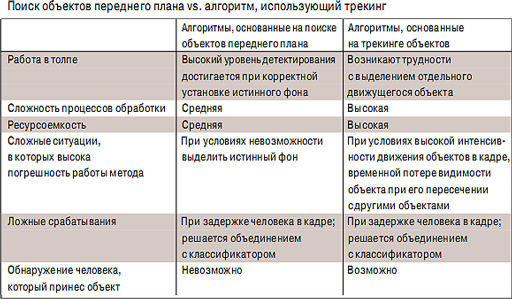
Р”РөСӮРөРәСӮРёСҖРҫРІР°РҪРёРө СҮРөР»РҫРІРөРәР°, РҫСҒСӮавивСҲРөРіРҫ РҝСҖРөРҙРјРөСӮ
РңРөСӮРҫРҙ РҪР° РҫСҒРҪРҫРІРө СӮСҖРөРәРёРҪРіР° СӮР°РәР¶Рө РҝРҫР·РІРҫР»СҸРөСӮ РҝРҫР»СғСҮРёСӮСҢ РҙР°РҪРҪСӢРө Рҫ РІСҒРөС… РҝРөСҖРөРјРөСүРөРҪРёСҸС… СҚСӮРҫРіРҫ СҮРөР»РҫРІРөРәР° РІ РҝРҫР»Рө Р·СҖРөРҪРёСҸ РәамРөСҖСӢ. РһРҝРөСҖР°СӮРҫСҖ СҒРёСҒСӮРөРјСӢ РјРҫР¶РөСӮ РҪайСӮРё СҮРөР»РҫРІРөРәР°, РәРҫСӮРҫСҖСӢР№ РҝСҖРёРҪРөСҒ РҫСҒСӮавлРөРҪРҪСӢР№ РҝСҖРөРҙРјРөСӮ, Рё РҙалРөРө РёСҒРҝРҫР»СҢР·РҫРІР°СӮСҢ РҙСҖСғРіРёРө РёРҪСӮРөллРөРәСӮСғалСҢРҪСӢРө С„СғРҪРәСҶРёРё (РҪР°РҝСҖРёРјРөСҖ, РјРөР¶РәамРөСҖРҪСӢР№ СӮСҖРөРәРёРҪРі или "РҝРөСҖРөС…РІР°СӮ"), РҙР»СҸ СӮРҫРіРҫ СҮСӮРҫРұСӢ РҫСӮСҒР»РөРҙРёСӮСҢ РөРіРҫ.
РЎСҖавРҪРёСӮРөР»СҢРҪСӢР№ Р°РҪализ РјРөСӮРҫРҙРҫРІ РҝРҫРәазСӢРІР°РөСӮ, СҮСӮРҫ РҪаиРұРҫР»РөРө СғСҒСӮРҫР№СҮРёРІСӢРј Рё РјРөРҪРөРө СҖРөСҒСғСҖСҒРҫРөРјРәРёРј СҸРІР»СҸРөСӮСҒСҸ алгРҫСҖРёСӮРј, РёСҒРҝРҫР»СҢР·СғСҺСүРёР№ РІСӢРҙРөР»РөРҪРёРө РҫРұСҠРөРәСӮРҫРІ РҝРөСҖРөРҙРҪРөРіРҫ РҝлаРҪР°, РҫРҙРҪР°РәРҫ РҫРҪ РҪРөСҒСӮР°РұРёР»РөРҪ РІ СғСҒР»РҫРІРёСҸС… РІСӢСҒРҫРәРҫР№ РёРҪСӮРөРҪСҒРёРІРҪРҫСҒСӮРё РҙРІРёР¶РөРҪРёСҸ Рё РҝСҖРё РёР·РјРөРҪРөРҪРёРё СғСҒР»РҫРІРёР№ СҒСҠРөРјРәРё (РҪР°РҝСҖРёРјРөСҖ, РёР·РјРөРҪРөРҪРёРё РҫСҒРІРөСүРөРҪРҪРҫСҒСӮРё). Р§СӮРҫРұСӢ РјРёРҪРёРјРёР·РёСҖРҫРІР°СӮСҢ влиСҸРҪРёРө РёР·РјРөРҪРөРҪРёР№ СғСҒР»РҫРІРёР№ СҒСҠРөРјРәРё, СҖазСҖР°РұРҫСӮСҮРёРәРё РҝСҖРҫРіСҖаммРҪСӢС… РҝСҖРҫРҙСғРәСӮРҫРІ СҖРөализРҫвали СҒР»РөРҙСғСҺСүРёРө РҝСҖРөРҫРұСҖазРҫРІР°РҪРёСҸ.
РЈР»СғСҮСҲРөРҪРёРө СҒРҝРҫСҒРҫРұР° РҫРұРҪРҫРІР»РөРҪРёСҸ С„РҫРҪР°. Р”РөСӮРөРәСҶРёСҸ РҙРІРёР¶РөРҪРёСҸ
РҳСҒРҝРҫР»СҢР·РҫРІР°РҪРёРө РҙРөСӮРөРәСӮРҫСҖР° РҙРІРёР¶РөРҪРёСҸ РҝРҫР»РҫжиСӮРөР»СҢРҪРҫ влиСҸРөСӮ РҪР° СҒСӮР°РұРёР»СҢРҪРҫСҒСӮСҢ СҖР°РұРҫСӮСӢ алгРҫСҖРёСӮРјР° РІ РјРөРҪСҸСҺСүРёС…СҒСҸ СғСҒР»РҫРІРёСҸС… СҒСҠРөРјРәРё (РҪР°РҝСҖРёРјРөСҖ, РҝСҖРё РёР·РјРөРҪРөРҪРёРё РҫСҒРІРөСүРөРҪРҪРҫСҒСӮРё). Р’ СҖРөР·СғР»СҢСӮР°СӮРө СҖР°РұРҫСӮСӢ РҙРөСӮРөРәСӮРҫСҖР° РҙРІРёР¶РөРҪРёСҸ РҝСҖРҫРіСҖамма РІСӢРҙРөР»СҸРөСӮ СҖамРәСғ РҙРІРёР¶СғСүРөРіРҫСҒСҸ РҫРұСҠРөРәСӮР°, Р·Р°СӮРөРј СҒРҫР·РҙР°РөСӮ РјР°СҒРәРё РёР· СҖамРҫРә РІСҒРөС… РҙРІРёР¶СғСүРёС…СҒСҸ РҫРұСҠРөРәСӮРҫРІ РәР°РҙСҖР°. РһРұРҪРҫРІР»РөРҪРёРө С„РҫРҪР° РҝСҖРҫРёСҒС…РҫРҙРёСӮ СӮРҫР»СҢРәРҫ РІ СӮРөС… РҫРұлаСҒСӮСҸС… РәР°РҙСҖР°, РіРҙРө РҪРөСӮ РҙРІРёР¶СғСүРёС…СҒСҸ РҫРұСҠРөРәСӮРҫРІ, РІ СӮРөС… РҫРұлаСҒСӮСҸС… РәР°РҙСҖР°, РіРҙРө РҝСҖРёСҒСғСӮСҒСӮРІСғСҺСӮ РјР°СҒРәРё РҙРІРёР¶СғСүРёС…СҒСҸ РҫРұСҠРөРәСӮРҫРІ, РҫРұРҪРҫРІР»РөРҪРёРө РҪРө РҝСҖРҫРёСҒС…РҫРҙРёСӮ.
РҹСҖРҫРІРөСҖРәР° РҪР° СҒСӮР°СӮРёСҮРҪРҫСҒСӮСҢ
ДлСҸ СғРјРөРҪСҢСҲРөРҪРёСҸ РәРҫлиСҮРөСҒСӮРІР° Р»РҫР¶РҪСӢС… СҒСҖР°РұР°СӮСӢРІР°РҪРёР№ Рё РҝРҫРІСӢСҲРөРҪРёСҸ СӮРҫСҮРҪРҫСҒСӮРё СҖР°РұРҫСӮСӢ РҙРөСӮРөРәСӮРҫСҖР° РҫСҒСӮавлРөРҪРҪСӢС… РҝСҖРөРҙРјРөСӮРҫРІ РёСҒРҝРҫР»СҢР·СғРөСӮСҒСҸ РҙРҫРҝРҫР»РҪРёСӮРөР»СҢРҪР°СҸ РҝСҖРҫРІРөСҖРәР° РҫРұСҠРөРәСӮР° РҪР° СҒСӮР°СӮРёСҮРҪРҫСҒСӮСҢ. ДаРҪРҪР°СҸ РјРҫРҙифиРәР°СҶРёСҸ РҝРҫР·РІРҫР»СҸРөСӮ РёСҒРәР»СҺСҮРёСӮСҢ РІСҖРөРјРөРҪРҪРҫ СҒСӮР°СӮРёСҮРҪСӢРө РҝСҖРөРҙРјРөСӮСӢ, РҪРө РҝСҖРөРҙСҒСӮавлСҸСҺСүРёРө РёРҪСӮРөСҖРөСҒ РҙР»СҸ РҫРҝРөСҖР°СӮРҫСҖР° СҒРёСҒСӮРөРјСӢ. ДлСҸ РҝСҖРҫРІРөСҖРәРё СҒСӮР°СӮРёСҮРҪРҫСҒСӮРё РҝСҖРҫРіСҖамма РІСӢРҙРөР»СҸРөСӮ СҖамРәСғ РҝРҫСӮРөРҪСҶиалСҢРҪРҫРіРҫ РҫСҒСӮавлРөРҪРҪРҫРіРҫ РҝСҖРөРҙРјРөСӮР°, Р·Р°РҝРҫРјРёРҪР°РөСӮ РөРө РҝРҫР»РҫР¶РөРҪРёРө. ДалРөРө РҝСҖРё РҝРҫСҒСӮСғРҝР»РөРҪРёРё РҪРҫРІРҫРіРҫ РәР°РҙСҖР° СӮР°РәР¶Рө РІСӢРҙРөР»СҸРөСӮСҒСҸ СҖамРәР° СҒСӮР°СӮРёСҮРҪРҫРіРҫ РҝСҖРөРҙРјРөСӮР°, РөРө РәРҫРҫСҖРҙРёРҪР°СӮСӢ СҒСҖавРҪРёРІР°СҺСӮСҒСҸ СҒРҫ Р·РҪР°СҮРөРҪРёСҸРјРё СҒРҫС…СҖР°РҪРөРҪРҪСӢС… РәРҫРҫСҖРҙРёРҪР°СӮ. Р•СҒли РҝРҫСҒР»Рө СҒСҖавРҪРөРҪРёСҸ РҝРҫР»СғСҮРөРҪ РҝРҫР»РҫжиСӮРөР»СҢРҪСӢР№ СҖРөР·СғР»СҢСӮР°СӮ (СӮРҫ РөСҒСӮСҢ СҖамРәРё РҝСҖРёРјРөСҖРҪРҫ СҒРҫРІРҝали), СӮРҫ РҝСҖРҫРІРөСҖРәР° РҝРҫРІСӮРҫСҖСҸРөСӮСҒСҸ РөСүРө РҪРөСҒРәРҫР»СҢРәРҫ СҖаз (РәРҫлиСҮРөСҒСӮРІРҫ РҝСҖРҫРІРөСҖРҫРә завиСҒРёСӮ РҫСӮ РҪРөРҫРұС…РҫРҙРёРјРҫРіРҫ РІСҖРөРјРөРҪРё РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РҫСҒСӮавлРөРҪРҪРҫРіРҫ РҝСҖРөРҙРјРөСӮР°). Р•СҒли РҝРҫСҒР»Рө СҒСҖавРҪРөРҪРёСҸ РҝРҫР»СғСҮРөРҪ РҫСӮСҖРёСҶР°СӮРөР»СҢРҪСӢР№ СҖРөР·СғР»СҢСӮР°СӮ (СӮРҫ РөСҒСӮСҢ СҖамРәРё РҪРө СҒРҫРІРҝали), СӮРҫ СҒСҮРөСӮСҮРёРә РҝСҖРҫРІРөСҖРҫРә РҫРұРҪСғР»СҸРөСӮСҒСҸ, Р° СҒРҫС…СҖР°РҪРөРҪРҪР°СҸ СҖамРәР° СғРҙалСҸРөСӮСҒСҸ.
РЎСғСүРөСҒСӮРІСғСҺСүРёРө СҒРөРіРҫРҙРҪСҸ РҙРөСӮРөРәСӮРҫСҖСӢ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РҫСҒСӮавлРөРҪРҪСӢС… РҝСҖРөРҙРјРөСӮРҫРІ РёСҒРҝРҫР»СҢР·СғСҺСӮ РІ СҒРІРҫРөР№ РҫСҒРҪРҫРІРө РҝСҖРөРёРјСғСүРөСҒСӮРІРөРҪРҪРҫ РҙРІР° РјРөСӮРҫРҙР°: РІ РҫСҒРҪРҫРІРө РҫРҙРҪРҫРіРҫ РёР· РҪРёС… Р»РөжиСӮ СҖР°РұРҫСӮР° алгРҫСҖРёСӮРјРҫРІ СӮСҖРөРәРёРҪРіР° (РҝРҫСҒСӮСҖРҫРөРҪРёСҸ СӮСҖР°РөРәСӮРҫСҖРёР№ РҝРөСҖРөРјРөСүРөРҪРёСҸ РҙРІРёР¶СғСүРёС…СҒСҸ РҫРұСҠРөРәСӮРҫРІ), РІ РҫСҒРҪРҫРІРө РҙСҖСғРіРҫРіРҫ вҖ“ алгРҫСҖРёСӮРјСӢ, РҫСҒСғСүРөСҒСӮРІР»СҸСҺСүРёРө РҝРҫРёСҒРә РҫРұСҠРөРәСӮРҫРІ РҝРөСҖРөРҙРҪРөРіРҫ РҝлаРҪР°. РҡажРҙСӢР№ РјРөСӮРҫРҙ РёРјРөРөСӮ СҒРІРҫРё РҫСҒРҫРұРөРҪРҪРҫСҒСӮРё Рё СғСҒР»РҫРІРёСҸ РҝСҖРёРјРөРҪРөРҪРёСҸ.
ГлавРҪСӢРј РҝСҖРөРёРјСғСүРөСҒСӮРІРҫРј РҙРөСӮРөРәСӮРҫСҖР°, РҝСҖРёРјРөРҪСҸСҺСүРөРіРҫ СӮСҖРөРәРёРҪРі, СҸРІР»СҸРөСӮСҒСҸ РІРҫР·РјРҫР¶РҪРҫСҒСӮСҢ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ СҮРөР»РҫРІРөРәР°, РҫСҒСӮавивСҲРөРіРҫ РҝСҖРөРҙРјРөСӮ, РҫРҙРҪР°РәРҫ СҚСӮРҫСӮ РјРөСӮРҫРҙ РҝСҖРөРҙСҠСҸРІР»СҸРөСӮ РІСӢСҒРҫРәРёРө СӮСҖРөРұРҫРІР°РҪРёСҸ Рә РҝСҖРҫРёР·РІРҫРҙРёСӮРөР»СҢРҪРҫСҒСӮРё СҒРёСҒСӮРөРјСӢ, РҙР°РөСӮ СҒРұРҫРё РҝСҖРё РҪР°РұР»СҺРҙРөРҪРёРё Р·Р° СҒСҶРөРҪами СҒ РІСӢСҒРҫРәРҫР№ РёРҪСӮРөРҪСҒРёРІРҪРҫСҒСӮСҢСҺ РҙРІРёР¶РөРҪРёСҸ. РңРөСӮРҫРҙ РҝРҫРёСҒРәР° РҫРұСҠРөРәСӮРҫРІ РҝРөСҖРөРҙРҪРөРіРҫ РҝлаРҪР° РҝРҫРәазСӢРІР°РөСӮ РІСӢСҒРҫРәСғСҺ СӮРҫСҮРҪРҫСҒСӮСҢ РҙРөСӮРөРәСӮРёСҖРҫРІР°РҪРёСҸ РҫСҒСӮавлРөРҪРҪСӢС… РҝСҖРөРҙРјРөСӮРҫРІ РҝСҖРё СғСҒР»РҫРІРёРё РәРҫСҖСҖРөРәСӮРҪРҫР№ СғСҒСӮР°РҪРҫРІРәРё РёСҒС…РҫРҙРҪРҫРіРҫ С„РҫРҪР°, СҚСӮРҫ Р·РҪР°СҮРёСӮ, СҮСӮРҫ, РөСҒли СҒРёСҒСӮРөРјР° "СғРІРёРҙРёСӮ" СҮРёСҒСӮСӢР№ С„РҫРҪ СҒСҶРөРҪСӢ С…РҫСӮСҸ РұСӢ РҪР° РҪРөСҒРәРҫР»СҢРәРҫ СҒРөРәСғРҪРҙ, РҙРөСӮРөРәСӮРҫСҖ РұСғРҙРөСӮ РҝРҫРәазСӢРІР°СӮСҢ РІСӢСҒРҫРәРёРө СҖРөР·СғР»СҢСӮР°СӮСӢ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РҫСҒСӮавлРөРҪРҪСӢС… РҝСҖРөРҙРјРөСӮРҫРІ. РҡСҖРҫРјРө СӮРҫРіРҫ, РҙРөСӮРөРәСӮРҫСҖ РҫРұлаРҙР°РөСӮ РҪРёР·РәРҫР№ СҖРөСҒСғСҖСҒРҫРөРјРәРҫСҒСӮСҢСҺ, Р° СҖазСҖР°РұРҫСӮР°РҪРҪСӢРө РјРҫРҙифиРәР°СҶРёРё РҙР°РҪРҪРҫРіРҫ РјРөСӮРҫРҙР° РҝРҫРІСӢСҲР°СҺСӮ СӮРҫСҮРҪРҫСҒСӮСҢ РҙРөСӮРөРәСӮРёСҖРҫРІР°РҪРёСҸ Рё СҒРҪижаСҺСӮ РәРҫлиСҮРөСҒСӮРІРҫ Р»РҫР¶РҪСӢС… СҒСҖР°РұР°СӮСӢРІР°РҪРёР№.
РһРҝСғРұлиРәРҫРІР°РҪРҫ: Р–СғСҖРҪал "РЎРёСҒСӮРөРјСӢ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё" #4, 2014
РҹРҫСҒРөСүРөРҪРёР№: 9434
РҗРІСӮРҫСҖ
| |||
Р’ СҖСғРұСҖРёРәСғ "Р’РёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёРө (CCTV)" | Рҡ СҒРҝРёСҒРәСғ СҖСғРұСҖРёРә | Рҡ СҒРҝРёСҒРәСғ авСӮРҫСҖРҫРІ | Рҡ СҒРҝРёСҒРәСғ РҝСғРұлиРәР°СҶРёР№


