






Р’ СҖСғРұСҖРёРәСғ "Р’РёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёРө (CCTV)" | Рҡ СҒРҝРёСҒРәСғ СҖСғРұСҖРёРә | Рҡ СҒРҝРёСҒРәСғ авСӮРҫСҖРҫРІ | Рҡ СҒРҝРёСҒРәСғ РҝСғРұлиРәР°СҶРёР№
Р—РҪР°РөСӮРө ли РІСӢ Рҫ РҝСҖРҫРіСҖаммРө "Р‘РөР·РҫРҝР°СҒРҪСӢР№ РіРҫСҖРҫРҙ"? РңРҪРҫРіРёРө СҮСӮРҫ-лиРұРҫ СҒР»СӢСҲали Рҫ РҪРөР№, РҪРҫ РІРҫСӮ Рҫ СҖРөалСҢРҪСӢС… СҖРөР·СғР»СҢСӮР°СӮах РҝСҖРҫРіСҖаммСӢ Р·РҪР°СҺСӮ РҪРө РІСҒРө. РҡР°РәРҫРІР° СҚффРөРәСӮРёРІРҪРҫСҒСӮСҢ РҝСҖРҫРөРәСӮР°, РҫРҝСҖавРҙал ли РҫРҪ РІР»РҫР¶РөРҪРҪСӢРө РІ РҪРөРіРҫ СҒСҖРөРҙСҒСӮРІР°? РһСӮРҪСҺРҙСҢ. РңРҪРҫРіРҫСҮРёСҒР»РөРҪРҪСӢРө РҝСҖРҫвалСӢ РІРҪРөРҙСҖРөРҪРёСҸ РІРёРҙРөРҫР°РҪалиСӮРёРәРё РІ СҖамРәах "Р‘РөР·РҫРҝР°СҒРҪРҫРіРҫ РіРҫСҖРҫРҙР°" РіРҫРІРҫСҖСҸСӮ Рҫ РұРҫР»СҢСҲРҫРј СҮРёСҒР»Рө СҒРәСҖСӢСӮСӢС… РҝСҖРҫРұР»РөРј Рё РҪРөРіРҫСӮРҫРІРҪРҫСҒСӮРё РҝСҖРҫРөРәСӮР° РІ СӮРөРәСғСүРөРј РІРёРҙРө Рә РҝСҖРёРјРөРҪРөРҪРёСҺ СҒРҫРІСҖРөРјРөРҪРҪСӢС… СӮРөС…РҪРҫР»РҫРіРёР№ РІРёРҙРөРҫР°РҪализа.

Рҡ.Р . РӨилиРҪ
ДиСҖРөРәСӮРҫСҖ РҝРҫ РҝСҖРҫРҙажам РһРһРһ "РҗРіСҖРөРіР°СӮРҫСҖ"
РўРҫР»СҢРәРҫ СҚРІРҫР»СҺСҶРёРҫРҪРҪРҫРө СҖазвиСӮРёРө РҝСҖРҫРөРәСӮР° "Р‘РөР·РҫРҝР°СҒРҪСӢР№ РіРҫСҖРҫРҙ" РҫСӮ РҝСҖРҫСҒСӮРҫРіРҫ Рә СҒР»РҫР¶РҪРҫРјСғ РјРҫР¶РөСӮ РҝСҖРёРІРөСҒСӮРё Рә Р¶РөлаРөРјРҫРіРҫ СҖРөР·СғР»СҢСӮР°СӮСғ. РңРҪРҫРіРёРј СғР¶Рө СҒСӮалРҫ РҝРҫРҪСҸСӮРҪРҫ, СҮСӮРҫ РұРөР· РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёСҸ СҒРҫРІСҖРөРјРөРҪРҪСӢС… СӮРөС…РҪРҫР»РҫРіРёР№ РІРёРҙРөРҫР°РҪалиСӮРёРәРё РҝСҖРё СҒРҫР·РҙР°РҪРёРё Рё СҚРәСҒРҝР»СғР°СӮР°СҶРёРё СҒРёСҒСӮРөРј СӮР°РәРҫРіРҫ РјР°СҒСҲСӮР°РұР° РҪРө РҫРұРҫР№СӮРёСҒСҢ. Рҗ СҮСӮРҫ Р¶Рө РҙРҫлжРҪРҫ РҫРұСҸР·Р°СӮРөР»СҢРҪРҫ РІС…РҫРҙРёСӮСҢ РІ РҝРҫРҪСҸСӮРёРө РІРёРҙРөРҫР°РҪалиСӮРёРәРё РҙР»СҸ РҪСғР¶Рҙ "Р‘РөР·РҫРҝР°СҒРҪРҫРіРҫ РіРҫСҖРҫРҙР°"? ДавайСӮРө СҖР°СҒСҒРјРҫСӮСҖРёРј 3 РіСҖСғРҝРҝСӢ РҪаиРұРҫР»РөРө РІРҫСҒСӮСҖРөРұРҫРІР°РҪРҪСӢС… РІ РҙР°РҪРҪРҫРј СҒР»СғСҮР°Рө алгРҫСҖРёСӮРјРҫРІ РІРёРҙРөРҫР°РҪализа:
РЎРөСҖРІРёСҒРҪСӢРө РҙРөСӮРөРәСӮРҫСҖСӢ авСӮРҫРјР°СӮРёСҮРөСҒРәРё СҖРөРіРёСҒСӮСҖРёСҖСғСҺСӮ СҒР»СғСҮаи РІСӢС…РҫРҙР° РёР· СҒСӮСҖРҫСҸ РәамРөСҖ или РҫСҒРІРөСӮРёСӮРөР»СҢРҪРҫРіРҫ РҫРұРҫСҖСғРҙРҫРІР°РҪРёСҸ РҙР»СҸ РҝРҫСҒСӮРҫСҸРҪРҪРҫРіРҫ РҝРҫРҙРҙРөСҖжаРҪРёСҸ СҒРёСҒСӮРөРјСӢ РІРёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёСҸ РІ СҖР°РұРҫСҮРөРј СҒРҫСҒСӮРҫСҸРҪРёРё. Р”РөСӮРөРәСӮРҫСҖСӢ РҫРҝСҖРөРҙРөР»СҸСҺСӮ СӮР°РәРёРө РҪРөРёСҒРҝСҖавРҪРҫСҒСӮРё, РәР°Рә РҝСҖРҫРҝР°РҙР°РҪРёРө РІРёРҙРөРҫСҒРёРіРҪала, РҝРҫР»РҫРјРәСғ СҒРёСҒСӮРөРјСӢ авСӮРҫРҝРҫРҙСҒСӮСҖРҫР№РәРё РҙиафСҖагмСӢ, РөСҒСӮРөСҒСӮРІРөРҪРҪРҫРө загСҖСҸР·РҪРөРҪРёРө РҫРұСҠРөРәСӮРёРІР°. РЎРөСҖРІРёСҒРҪСӢРө РҙРөСӮРөРәСӮРҫСҖСӢ авСӮРҫРјР°СӮРёСҮРөСҒРәРё СҖР°СҒРҝРҫР·РҪР°СҺСӮ СҒРёСӮСғР°СҶРёРё СҒР°РұРҫСӮажа СҒРҫ СҒСӮРҫСҖРҫРҪСӢ СҮРөР»РҫРІРөРәР°, РҪР°РҝСҖРёРјРөСҖ, загСҖажРҙРөРҪРёРө РәамРөСҖСӢ или Р·Р°РәСҖСӢСӮРёРө РҫРұСҠРөРәСӮРёРІР°, СҖР°СҒС„РҫРәСғСҒРёСҖРҫРІРәР°, РёР·РјРөРҪРөРҪРёРө РҫСҖРёРөРҪСӮР°СҶРёРё РәамРөСҖСӢ Рё РҫСҒР»РөРҝР»РөРҪРёРө СҒРөРҪСҒРҫСҖР°. РӯСӮРё С„СғРҪРәСҶРёРё РөСүРө РёРҪРҫРіРҙР° РҪазСӢРІР°СҺСӮ РәРҫРҪСӮСҖРҫР»РөРј СҒСҶРөРҪСӢ. РқРөРәРҫСӮРҫСҖСӢРө С„РҫСҖРјСӢ СҒР°РұРҫСӮажа, РҪР°РҝСҖРёРјРөСҖ СғСҒСӮР°РҪРҫРІРәСғ Р·РөСҖРәала РҝРөСҖРөРҙ РҫРұСҠРөРәСӮРёРІРҫРј СӮРөР»РөРәамРөСҖСӢ, РҫРҝРөСҖР°СӮРҫСҖСғ замРөСӮРёСӮСҢ РҝСҖР°РәСӮРёСҮРөСҒРәРё РҪРөРІРҫР·РјРҫР¶РҪРҫ, РҫСҒРҫРұРөРҪРҪРҫ РөСҒли РөРіРҫ РІРҪРёРјР°РҪРёРө СҖР°СҒСҒСҖРөРҙРҫСӮРҫСҮРөРҪРҫ РҝРҫ РҪРөСҒРәРҫР»СҢРәРёРј СҚРәСҖР°РҪам СҒРёСӮСғР°СҶРёРҫРҪРҪРҫРіРҫ СҶРөРҪСӮСҖР°. РҡРҫРҪРөСҮРҪСӢРө РҝРҫР»СҢР·РҫРІР°СӮРөли, РәРҫСӮРҫСҖСӢРө СғСҒР»СӢСҲали Рҫ РҝРҫСӮРөРҪСҶиалСҢРҪСӢС… РІРҫР·РјРҫР¶РҪРҫСҒСӮСҸС… РәРҫРјРҝСҢСҺСӮРөСҖРҪСӢС… РҝСҖРҫРіСҖамм РІ РҫРұлаСҒСӮРё авСӮРҫРјР°СӮРёСҮРөСҒРәРҫРіРҫ СҖР°СҒРҝРҫР·РҪаваРҪРёСҸ РҝРҫРІРөРҙРөРҪРёСҸ СҮРөР»РҫРІРөРәР°, СҮР°СҒСӮРҫ РҪРөРҙРҫРҫСҶРөРҪРёРІР°СҺСӮ важРҪРҫСҒСӮСҢ СҖР°РұРҫСӮСӢ СҒРөСҖРІРёСҒРҪСӢС… РҙРөСӮРөРәСӮРҫСҖРҫРІ. РқР° РҝСҖР°РәСӮРёРәРө СҒРөСҖРІРёСҒРҪСӢРө РҙРөСӮРөРәСӮРҫСҖСӢ СҸРІР»СҸСҺСӮСҒСҸ СҒамРҫР№ РҝРҫР»РөР·РҪРҫР№ РІРёРҙРөРҫР°РҪалиСӮРёРәРҫР№, СӮР°Рә РәР°Рә РҪРө СӮСҖРөРұСғСҺСӮ СҒРҝРөСҶиалСҢРҪРҫР№ РҪР°СҒСӮСҖРҫР№РәРё Рё СҚРәРҫРҪРҫРјСҸСӮ Р·РҪР°СҮРёСӮРөР»СҢРҪСӢРө СҖРөСҒСғСҖСҒСӢ РҪР° РҫРұСҒР»СғживаРҪРёРё СҒРёСҒСӮРөРјСӢ. Р РөализРҫРІР°СӮСҢ РәР°СҮРөСҒСӮРІРөРҪРҪСӢРө СҒРөСҖРІРёСҒРҪСӢРө РҙРөСӮРөРәСӮРҫСҖСӢ РҪРө СӮР°Рә-СӮРҫ РҝСҖРҫСҒСӮРҫ РёР·-Р·Р° СҒСғСүРөСҒСӮРІРөРҪРҪРҫРіРҫ СҖазРҪРҫРҫРұСҖазиСҸ РҫРұРҫСҖСғРҙРҫРІР°РҪРёСҸ Рё СғСҒР»РҫРІРёР№ РІРҪРөСҲРҪРөР№ СҒСҖРөРҙСӢ. Р”РөСӮРөРәСӮРҫСҖСӢ РҪРөРҫРұС…РҫРҙРёРјРҫ РҙлиСӮРөР»СҢРҪРҫ СӮРөСҒСӮРёСҖРҫРІР°СӮСҢ (РәР°Рә Рё Р»СҺРұСғСҺ РҙСҖСғРіСғСҺ РІРёРҙРөРҫР°РҪалиСӮРёРәСғ) РҪР° РҫРұСҲРёСҖРҪРҫРј РҪР°РұРҫСҖРө РҝРҫР»РҫжиСӮРөР»СҢРҪСӢС… Рё РҫСӮСҖРёСҶР°СӮРөР»СҢРҪСӢС… РҝСҖРёРјРөСҖРҫРІ РІ СҖазлиСҮРҪСӢС… СғСҒР»РҫРІРёСҸС….
РқР° РјРҪРҫР¶РөСҒСӮРІРө СҖР°СҒРҝСҖРөРҙРөР»РөРҪРҪСӢС… РҫРұСҠРөРәСӮРҫРІ (РҪРөС„-СӮРө- Рё газРҫРҝСҖРҫРІРҫРҙСӢ, СӮРҫСҖРіРҫРІСӢРө СҒРөСӮРё, РҗР—РЎ, СҒРөСӮРё РұР°РҪРәРҫРјР°СӮРҫРІ, РҝРҫРҙСҠРөР·РҙСӢ жилСӢС… РҙРҫРјРҫРІ Рё СӮ.Рҝ.), РҪР° РәРҫСӮРҫСҖСӢС… РёСҒРҝРҫР»СҢР·СғРөСӮСҒСҸ Рё РҫРұСҒР»СғживаРөСӮСҒСҸ СӮСӢСҒСҸСҮР° Рё РұРҫР»РөРө РәамРөСҖ РҪР°РұР»СҺРҙРөРҪРёСҸ, РҫСҮРөРҪСҢ Р°РәСӮСғалСҢРҪР° РҪР°РҙРөР¶РҪР°СҸ Р·Р°СүРёСӮР° РІРёРҙРөРҫРјР°СӮРөСҖиалРҫРІ РҫСӮ РІРҫР·РјРҫР¶РҪРҫРіРҫ РҝРҫРҙР»РҫРіР°. Р РөализаСҶРёСҸ СҚффРөРәСӮРёРІРҪРҫРіРҫ РјРөС…Р°РҪРёР·РјР° Р·Р°СүРёСӮСӢ РҝСҖРөРҙРҝРҫлагаРөСӮ РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёРө СҒС…РөРјСӢ РҝРҫСӮРҫСҮРҪРҫР№ СҶРёС„СҖРҫРІРҫР№ РҝРҫРҙРҝРёСҒРё РІРҫ РІСҒРөР№ СҶРөРҝРё РҝРөСҖРөРҙР°СҮРё РҙР°РҪРҪСӢС… РҫСӮ РёСҒСӮРҫСҮРҪРёРәР° (РәамРөСҖСӢ) РҙРҫ РҝРҫСӮСҖРөРұРёСӮРөР»СҸ (СҖР°РұРҫСҮРөРө РјРөСҒСӮРҫ РҫРҝРөСҖР°СӮРҫСҖР°). Р’ РІРёРҙРөРҫСҒРёРіРҪал РІРҪРөРҙСҖСҸСҺСӮСҒСҸ СҶРёС„СҖРҫРІСӢРө РјРөСӮР°РҙР°РҪРҪСӢРө или СҒРәСҖСӢСӮСӢРө "РІРҫРҙСҸРҪСӢРө Р·РҪР°РәРё", СҒРҫРҙРөСҖжаСүРёРө СғРҪРёРәалСҢРҪСӢР№ РёРҙРөРҪСӮифиРәР°СӮРҫСҖ РІРёРҙРөРҫРәамРөСҖСӢ, СӮРөРәСғСүРөРө РІСҖРөРјСҸ или, РҪР°РҝСҖРёРјРөСҖ, Р“РӣРһРқРҗРЎРЎ/GPS-РәРҫРҫСҖРҙРёРҪР°СӮСғ. РқРөСҒРҫРҫСӮРІРөСӮСҒСӮРІРёРө РІСҖРөРјРөРҪРҪРҫР№ РјРөСӮРәРё Рё РәРҫРҪСӮСҖРҫР»СҢРҪРҫР№ СҒСғРјРјСӢ РҝРҫР·РІРҫР»СҸРөСӮ РјРіРҪРҫРІРөРҪРҪРҫ РІСӢСҸРІРёСӮСҢ фаРәСӮ РјРҫСҲРөРҪРҪРёСҮРөСҒСӮРІР°.

Р’ Р°РҪалРҫРіРҫРІСӢС… Р¶Рө СҒРёСҒСӮРөмах РәамРөСҖР° "РҪРө СғРјРөРөСӮ" РҪР°РҪРҫСҒРёСӮСҢ РәСҖРёРҝСӮРҫРіСҖафиСҮРөСҒРәСғСҺ РјРөСӮРәСғ РҪР° РІРёРҙРөРҫ. Р—РҙРөСҒСҢ РІРҫР·РјРҫР¶РҪРҫ РҝСҖРёРјРөРҪРөРҪРёРө РҙСҖСғРіРёС… РјРөС…Р°РҪРёР·РјРҫРІ Р·Р°СүРёСӮСӢ РҪР° СҒСӮРҫСҖРҫРҪРө СҚРҪРәРҫРҙРөСҖР° или СҒРөСҖРІРөСҖР°. Р’ СҮР°СҒСӮРҪРҫСҒСӮРё, РёРҪСӮРөллРөРәСӮСғалСҢРҪСӢР№ СҚРҪРәРҫРҙРөСҖ РјРҫР¶РөСӮ СҖРөагиСҖРҫРІР°СӮСҢ РІ РјРҫРјРөРҪСӮ РҝРҫРҙРјРөРҪСӢ РІРёРҙРөРҫ СҒ РҝРҫРјРҫСүСҢСҺ СҒРөСҖРІРёСҒРҪСӢС… РҙРөСӮРөРәСӮРҫСҖРҫРІ или РҫРұРҪР°СҖСғживаСӮСҢ фаРәСӮСӢ Р·Р°СҶРёРәливаРҪРёСҸ РІРёРҙРөРҫ РҝРҫ СҒСӮР°СӮРёСҒСӮРёСҮРөСҒРәРёРј РҝСҖРёР·РҪР°Рәам. РҹСҖРё СҚСӮРҫРј СҒР»РҫР¶РҪРҫ РёР·РұРөжаСӮСҢ Р»РҫР¶РҪСӢС… СҒСҖР°РұР°СӮСӢРІР°РҪРёР№ РІ РјРҫРјРөРҪСӮ РҝРөСҖРөРәР»СҺСҮРөРҪРёСҸ РәамРөСҖСӢ РёР· РҪРҫСҮРҪРҫРіРҫ СҖРөжима РІ РҙРҪРөРІРҪРҫР№ или РІ СҒР»СғСҮР°Рө СҖРөР·РәРҫР№ авСӮРҫРҝРҫРҙСҒСӮСҖРҫР№РәРё Рә СғСҒР»РҫРІРёСҸРј РІРҪРөСҲРҪРөР№ СҒСҖРөРҙСӢ. Р’ РҫСӮлиСҮРёРө РҫСӮ "СғРјРҪСӢС…" IP-РәамРөСҖ, Р°СғСӮРөРҪСӮифиРәР°СҶРёСҸ Р°РҪалРҫРіРҫРІСӢС… РәамРөСҖ РҪР° СҒРөРіРҫРҙРҪСҸСҲРҪРөР№ РҙРөРҪСҢ РҫСҒСӮР°РөСӮСҒСҸ "РұРҫР»СҢРҪРҫР№" РҝСҖРҫРұР»РөРјРҫР№.
РҳРҪРҙРөРәСҒ СҒРҫРұСӢСӮРёР№ СҒСғСүРөСҒСӮРІРөРҪРҪРҫ РҝРҫРІСӢСҲР°РөСӮ СҚффРөРәСӮРёРІРҪРҫСҒСӮСҢ СҖР°РұРҫСӮСӢ РҝСҖавРҫРҫС…СҖР°РҪРёСӮРөР»СҢРҪСӢС… РҫСҖРіР°РҪРҫРІ РҝСҖРё СҖР°СҒСҒР»РөРҙРҫРІР°РҪРёРё РҝСҖРҫРёСҒСҲРөСҒСӮРІРёР№. РҳСҒРҝРҫР»СҢР·СғСҸ РёРҪРҙРөРәСҒ, РҫРҝРөСҖР°СӮРҫСҖ РјРҫР¶РөСӮ РҪайСӮРё РҪСғР¶РҪСӢРө РәР°РҙСҖСӢ РІ РІРёРҙРөРҫР°СҖС…РёРІРө РІ 10, Р° СӮРҫ Рё РІ 100 СҖаз РұСӢСҒСӮСҖРөРө, СҮРөРј РҝСҖРё СҖСғСҮРҪРҫРј РҝРҫРёСҒРәРө. Р’РҫР·РјРҫР¶РҪРҫСҒСӮСҢ РҝРҫРёСҒРәР° "РҝРҫ СҒРҫРұСӢСӮРёСҸРј" СҒСғСүРөСҒСӮРІРөРҪРҪРҫ СғРҝСҖРҫСҒСӮРёСӮ СҖР°РұРҫСӮСғ РәР°Рә РҫСҖРіР°РҪам РҝСҖавРҫРҝРҫСҖСҸРҙРәР° РҝСҖРё РҝРҫСҒСӮР°РҪализРө СҒРҫРІРөСҖСҲРөРҪРҪРҫРіРҫ РҝСҖавРҫРҪР°СҖСғСҲРөРҪРёСҸ, СӮР°Рә Рё РҫРҝРөСҖР°СӮРҫСҖам СҒРёСҒСӮРөРјСӢ РҝСҖРё РёРҙРөРҪСӮифиРәР°СҶРёРё Рё РәлаСҒСҒифиРәР°СҶРёРё РҝСҖРҫРёСҒСҲРөСҒСӮРІРёСҸ.
Р’ РҪР°СҒСӮРҫСҸСүРөРө РІСҖРөРјСҸ РІ СҖамРәах РҝСҖРҫРіСҖаммСӢ "Р‘РөР·РҫРҝР°СҒРҪСӢР№ РіРҫСҖРҫРҙ" РҙР»СҸ РҫС…СҖР°РҪСӢ жилиСүРҪРҫ-РәРҫРјРјСғРҪалСҢРҪРҫРіРҫ С…РҫР·СҸР№СҒСӮРІР° РҪаиРұРҫР»РөРө РІРҫСҒСӮСҖРөРұРҫРІР°РҪСӢ РҙРөСӮРөРәСӮРҫСҖСӢ СҒР»РөРҙСғСҺСүРёС… СӮРёРҝРҫРІ СҒРҫРұСӢСӮРёР№: РҝРҫСҸРІР»РөРҪРёРө СҮРөР»РҫРІРөРәР°, РІС…РҫРҙ или РІСӢС…РҫРҙ РёР· РҝРҫРҙСҠРөР·РҙР°, РұСӢСҒСӮСҖРҫРө РҝРөСҖРөРјРөСүРөРҪРёРө, РҫжиРҙР°РҪРёРө. РўРҫСҮРҪРҫСҒСӮСҢ СҖР°СҒРҝРҫР·РҪаваРҪРёСҸ СҒРҫРұСӢСӮРёР№ РІС…РҫРҙР° Рё РІСӢС…РҫРҙР° РјРҫР¶РөСӮ РұСӢСӮСҢ Р·РҪР°СҮРёСӮРөР»СҢРҪРҫ РҝРҫРІСӢСҲРөРҪР° Р·Р° СҒСҮРөСӮ СҒРёРҪС…СҖРҫРҪРҪРҫР№ СҖР°РұРҫСӮСӢ РІРёРҙРөРҫР°РҪалиСӮРёСҮРөСҒРәРҫРіРҫ РҹРһ, РҫРұСҒР»СғживаСҺСүРөРіРҫ РІРҪСғСӮСҖРөРҪРҪСҺСҺ Рё РІРҪРөСҲРҪСҺСҺ РәамРөСҖСӢ РҫРҙРҪРҫРіРҫ РҝРҫРҙСҠРөР·РҙР°.
РўРҫСҮРҪРҫСҒСӮСҢ РҙРөСӮРөРәСӮРҫСҖР° С…Р°СҖР°РәСӮРөСҖРёР·СғРөСӮСҒСҸ РІРөСҖРҫСҸСӮРҪРҫСҒСӮСҢСҺ РҫРұРҪР°СҖСғР¶РөРҪРёСҸ РҪСғР¶РҪРҫРіРҫ СҒРҫРұСӢСӮРёСҸ (СҮСғРІСҒСӮРІРёСӮРөР»СҢРҪРҫСҒСӮСҢ) Рё РІРөСҖРҫСҸСӮРҪРҫСҒСӮСҢСҺ Р»РҫР¶РҪРҫРіРҫ СҒСҖР°РұР°СӮСӢРІР°РҪРёСҸ. РазлиСҮРҪСӢРө СҒСҶРөРҪР°СҖРёРё РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёСҸ РёРҪРҙРөРәСҒР° РҝСҖРөРҙРҝРҫлагаСҺСӮ СҖазлиСҮРҪРҫРө СҒРҫРҫСӮРҪРҫСҲРөРҪРёРө РҙРҫРҝСғСҒСӮРёРјСӢС… Р·РҪР°СҮРөРҪРёР№ СҚСӮРёС… РҙРІСғС… СҒРҫСҒСӮавлСҸСҺСүРёС… СӮРҫСҮРҪРҫСҒСӮРё.
РҳРҪРҙРөРәСҒРёСҖСғСҺСүРёР№ РҙРөСӮРөРәСӮРҫСҖ РІСӢРҙРөР»СҸРөСӮ РјРҫРјРөРҪСӮ РІСҖРөРјРөРҪРё СҒРҫРұСӢСӮРёСҸ Рё С„РҫСҖРјРёСҖСғРөСӮ РёР·РҫРұСҖажРөРҪРёРө РҙР»СҸ иллСҺСҒСӮСҖР°СҶРёРё СҒРҫРұСӢСӮРёСҸ. РҡР°СҮРөСҒСӮРІРҫ РІСӢРұРҫСҖР° РәР°РҙСҖР° РІ СҒСғСүРөСҒСӮРІРөРҪРҪРҫР№ СҒСӮРөРҝРөРҪРё РҫРҝСҖРөРҙРөР»СҸРөСӮ СғРҙРҫРұСҒСӮРІРҫ Рё СҚффРөРәСӮРёРІРҪРҫСҒСӮСҢ РҙРөСӮРөРәСӮРҫСҖР°. Р•СҒли РҙРөСӮРөРәСӮРҫСҖ РұРөСҖРөСӮ РҝРөСҖРІСӢР№ РҝРҫРҝавСҲРёР№СҒСҸ РәР°РҙСҖ, СӮРҫ, СҒРәРҫСҖРөР№ РІСҒРөРіРҫ, СӮР°РәРҫР№ РәР°РҙСҖ РҪРө РұСғРҙРөСӮ СҖРөРҝСҖРөР·РөРҪСӮР°СӮРёРІРҪСӢРј, Рё РҫРҝРөСҖР°СӮРҫСҖСғ РҝРҫСӮСҖРөРұСғРөСӮСҒСҸ РҙРҫРҝРҫР»РҪРёСӮРөР»СҢРҪРҫРө РІСҖРөРјСҸ РҙР»СҸ РҙалСҢРҪРөР№СҲРөРіРҫ РҝСҖРҫСҒРјРҫСӮСҖР° РІРёРҙРөРҫ. Рҗ РІСӢРұРҫСҖ РҫРҝСӮималСҢРҪРҫРіРҫ СҖР°РәСғСҖСҒР° СҒСҠРөРјРәРё РҫСҒРҫРұРөРҪРҪРҫ важРөРҪ РҝСҖРё РҙРөСӮРөРәСӮРёСҖРҫРІР°РҪРёРё лиСҶ.
Р’ РҝРҫСҒР»РөРҙРҪРөРө РІСҖРөРјСҸ РёРјРөРҪРҪРҫ РІРёРҙРөРҫР°РҪалиСӮРёРәР° РҫРҝРөСҖР°СӮРёРІРҪРҫРіРҫ СҖР°СҒРҝРҫР·РҪаваРҪРёСҸ РҝРҫРҙРҫР·СҖРёСӮРөР»СҢРҪСӢС… или РҪРөСҲСӮР°СӮРҪСӢС… СҒРёСӮСғР°СҶРёР№ (СӮР°РәРёС…, РәР°Рә РҫСҒСӮавлРөРҪРҪСӢР№ РҝСҖРөРҙРјРөСӮ, РҙСҖР°РәР°, РҝРҫжаСҖ, РҙСӢРј, РҝР°РҙР°СҺСүРёР№ или Р»РөжаСүРёР№ СҮРөР»РҫРІРөРә) РҫРұСҒСғР¶РҙалаСҒСҢ СғСҮР°СҒСӮРҪРёРәами СҖСӢРҪРәР° РІ РұРҫР»СҢСҲРөР№ СҒСӮРөРҝРөРҪРё, СҮРөРј СҒРөСҖРІРёСҒРҪСӢРө Рё РёРҪРҙРөРәСҒРёСҖСғСҺСүРёРө РҙРөСӮРөРәСӮРҫСҖСӢ. Р’ СҒРҫР·РҪР°РҪРёРё РәРҫРҪРөСҮРҪРҫРіРҫ РҝРҫР»СҢР·РҫРІР°СӮРөР»СҸ Р·Р°РҙР°СҮР° СҖР°СҒРҝРҫР·РҪаваРҪРёСҸ РҝРҫРІРөРҙРөРҪРёСҸ СҮРөР»РҫРІРөРәР° РІ СҖРөжимРө "СҖРөалСҢРҪРҫРіРҫ РІСҖРөРјРөРҪРё" Р·Р°РҪСҸла РҝРөСҖРІРҫРө РјРөСҒСӮРҫ. Р”РөР№СҒСӮРІРёСӮРөР»СҢРҪРҫ, РҝСҖРөРҙРҫСӮРІСҖР°СүРөРҪРёРө РҝСҖРөСҒСӮСғРҝР»РөРҪРёСҸ РІ РјРҫРјРөРҪСӮ РөРіРҫ СҒРІРөСҖСҲРөРҪРёСҸ Рё/или РҫРҝРөСҖР°СӮРёРІРҪРҫРө Р·Р°РҙРөСҖжаРҪРёРө РҝСҖРөСҒСӮСғРҝРҪРёРәР° РҝРҫ "РіРҫСҖСҸСҮРёРј СҒР»РөРҙам" СҸРІР»СҸРөСӮСҒСҸ важРҪРҫР№ Р·Р°РҙР°СҮРөР№, СҖРөСҲРөРҪРёРө РәРҫСӮРҫСҖРҫР№ РҙРҫлжРҪСӢ РёСҒРәР°СӮСҢ СҒРҝРөСҶиалиСҒСӮСӢ РҝРҫ РјР°СҲРёРҪРҪРҫРјСғ Р·СҖРөРҪРёСҺ Рё РёСҒРәСғСҒСҒСӮРІРөРҪРҪРҫРјСғ РёРҪСӮРөллРөРәСӮСғ.
РһРҝРөСҖР°СӮРёРІРҪРҫРө СҖР°СҒРҝРҫР·РҪаваРҪРёРө, РәРҫРҪРөСҮРҪРҫ, РІРҫР·РјРҫР¶РҪРҫ РҪР° РҪСӢРҪРөСҲРҪРөРј СғСҖРҫРІРҪРө СҖазвиСӮРёСҸ СӮРөС…РҪРҫР»РҫРіРёР№ РјР°СҲРёРҪРҪРҫРіРҫ Р·СҖРөРҪРёСҸ, РҪРҫ СӮРҫР»СҢРәРҫ РІ СҮР°СҒСӮРҪСӢС… СҒР»СғСҮР°СҸС… -РҝСҖРё РҫРҝСҖРөРҙРөР»РөРҪРҪРҫРј РҝРҫР»РҫР¶РөРҪРёРё РәамРөСҖСӢ, СҒСӮР°РұРёР»СҢРҪРҫРј РҫСҒРІРөСүРөРҪРёРё Рё С…Р°СҖР°РәСӮРөСҖРҪРҫРј РҝРҫРІРөРҙРөРҪРёРё Р»СҺРҙРөР№. РқРҫ, Рә СҒРҫжалРөРҪРёСҺ, РҝРҫРәР° РҪРө СҒСғСүРөСҒСӮРІСғРөСӮ РҙРҫСҒСӮР°СӮРҫСҮРҪРҫ СғРҪРёРІРөСҖСҒалСҢРҪСӢС… алгРҫСҖРёСӮРјРҫРІ, РІРҪРөРҙСҖРөРҪРёРө РәРҫСӮРҫСҖСӢС…, РҝРҫ РјРҫРөРјСғ РјРҪРөРҪРёСҺ, РІ СҖамРәах РҝСҖРҫРіСҖаммСӢ "Р‘РөР·РҫРҝР°СҒРҪСӢР№ РіРҫСҖРҫРҙ" РұСӢР»Рҫ РұСӢ СҚРәРҫРҪРҫРјРёСҮРөСҒРәРё РҫРҝСҖавРҙР°РҪРҪСӢРј.
Р”СҖСғРіР°СҸ СҒР»РҫР¶РҪРҫСҒСӮСҢ РҫРҝРөСҖР°СӮРёРІРҪРҫРіРҫ СҖР°СҒРҝРҫР·РҪаваРҪРёСҸ СҒРҫСҒСӮРҫРёСӮ РІ СӮРҫРј, СҮСӮРҫ РәСҖРёРјРёРҪалСҢРҪСӢРө РҙРөР№СҒСӮРІРёСҸ РІ РұРҫР»СҢСҲРёРҪСҒСӮРІРө СҒР»СғСҮР°РөРІ СҖРөРҙРәРҫ РҝСҖРҫРёСҒС…РҫРҙСҸСӮ РІ РҝРҫР»Рө Р·СҖРөРҪРёСҸ СғСҒСӮР°РҪРҫРІР»РөРҪРҪСӢС… РәамРөСҖ. Р—Р»РҫСғРјСӢСҲР»РөРҪРҪРёРәРё С…РҫСҖРҫСҲРҫ РҫСҒРІРөРҙРҫРјР»РөРҪСӢ РҫРұ РёС… СҖР°СҒРҝРҫР»РҫР¶РөРҪРёРё Рё СҚффРөРәСӮРёРІРҪРҫСҒСӮРё РјРҫРҪРёСӮРҫСҖРёРҪРіР°.
РҡамРөСҖСӢ РәРҫРҪСӮСҖРҫлиСҖСғСҺСӮ лиСҲСҢ малСғСҺ СҮР°СҒСӮСҢ РҝСҖРҫСҒСӮСҖР°РҪСҒСӮРІР° Р–РҡРҘ, РіРҙРө СҸСҖРәРҫ РІСӢСҖажРөРҪРҪСӢРө РҙРөР№СҒСӮРІРёСҸ РҝСҖРҫСӮРёРІ Р·Р°РәРҫРҪР° РәСҖайРҪРө малРҫРІРөСҖРҫСҸСӮРҪСӢ. РҹСҖРё СҚСӮРҫРј СҒРҫСӮСҖСғРҙРҪРёРәРё СҒР»СғР¶РұСӢ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё СҮР°СҒСӮРҫ РёСҒРҝРҫР»СҢР·СғСҺСӮ РәамРөСҖСӢ СҖРөСӮСҖРҫСҒРҝРөРәСӮРёРІРҪРҫ, РҙР»СҸ РІРҫСҒСҒСӮР°РҪРҫРІР»РөРҪРёСҸ С…РҫРҙР° СҒРҫРұСӢСӮРёР№ РҝРҫ РәРҫСҒРІРөРҪРҪСӢРј РҝСҖРёР·РҪР°Рәам. РҳРјРөРҪРҪРҫ РІ СҚСӮРҫРј СҒРҫСҒСӮРҫРёСӮ главРҪРҫРө РҝСҖРөРёРјСғСүРөСҒСӮРІРҫ РҝСғРұлиСҮРҪРҫР№ СҒРёСҒСӮРөРјСӢ РІРёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёСҸ, Рё РҝРҫСҚСӮРҫРјСғ важРҪСӢ РёРҪРҙРөРәСҒРёСҖСғСҺСүРёРө РҙРөСӮРөРәСӮРҫСҖСӢ.
РўР°РәРёРј РҫРұСҖазРҫРј, РҝРөСҖРөРҙ РҝСҖРҫРіСҖаммРҫР№ "Р‘РөР·РҫРҝР°СҒРҪСӢР№ РіРҫСҖРҫРҙ" СҒРөР№СҮР°СҒ СҒСӮРҫСҸСӮ РұРҫР»РөРө РҝСҖРҫСҒСӮСӢРө Р·Р°РҙР°СҮРё, СҮРөРј РҫРҝРөСҖР°СӮРёРІРҪРҫРө СҖР°СҒРҝРҫР·РҪаваРҪРёРө, Р° РёРјРөРҪРҪРҫ РҫРұРөСҒРҝРөСҮРөРҪРёРө РәР°СҮРөСҒСӮРІР° РІРёРҙРөРҫ, РәРҫРјРҝР»РөРәСҒРҪСӢР№ РјРҫРҪРёСӮРҫСҖРёРҪРі СҖР°РұРҫСӮРҫСҒРҝРҫСҒРҫРұРҪРҫСҒСӮРё СҒРёСҒСӮРөРјСӢ, РұСӢСҒСӮСҖСӢР№ РҝРҫРёСҒРә РҝРҫ РІРёРҙРөРҫР°СҖС…РёРІСғ, СғРҙалРөРҪРҪСӢР№ РҙРҫСҒСӮСғРҝ РҙР»СҸ РҙиагРҪРҫСҒСӮРёРәРё. РқР° СҖСӢРҪРәРө СғР¶Рө СҒРөР№СҮР°СҒ СҒСғСүРөСҒСӮРІСғСҺСӮ РіРҫСӮРҫРІСӢРө РҝСҖРҫРҙСғРәСӮСӢ, РҫСӮРІРөСҮР°СҺСүРёРө СҚСӮРёРј СӮСҖРөРұРҫРІР°РҪРёСҸРјРё, РҙРөР»Рҫ лиСҲСҢ Р·Р° РҝСҖавилСҢРҪСӢРј РІСӢРұРҫСҖРҫРј Рё РіСҖамРҫСӮРҪРҫР№ СҒРёСҒСӮРөРјРҪРҫР№ РёРҪСӮРөРіСҖР°СҶРёРөР№.
РҡР°Рә СҸ СғР¶Рө РіРҫРІРҫСҖРёР» РІСӢСҲРө, СӮРҫР»СҢРәРҫ СҚРІРҫР»СҺСҶРёРҫРҪРҪРҫРө СҖазвиСӮРёРө РҝСҖРҫРөРәСӮР° "Р‘РөР·РҫРҝР°СҒРҪСӢР№ РіРҫСҖРҫРҙ" РјРҫР¶РөСӮ РҝСҖРёРІРөСҒСӮРё Рә Р¶РөлаРөРјРҫРіРҫ СҖРөР·СғР»СҢСӮР°СӮСғ - РІСӢСҒРҫРәРҫР№ СҚффРөРәСӮРёРІРҪРҫСҒСӮРё. РһСҮРөРІРёРҙРҪРҫ, СҮСӮРҫ РҙР»СҸ СҚРІРҫР»СҺСҶРёРҫРҪРҪРҫРіРҫ СҖазвиСӮРёСҸ РёРҪР¶РөРҪРөСҖам РҝСҖРҫРөРәСӮР° РҪСғР¶РҪРҫ РҪР°РҝСҖСҸРјСғСҺ СҖР°РұРҫСӮР°СӮСҢ СҒ РҫСӮРөСҮРөСҒСӮРІРөРҪРҪСӢРјРё РҝРҫСҒСӮавСүРёРәами СҒРҫРІСҖРөРјРөРҪРҪСӢС… СӮРөС…РҪРҫР»РҫРіРёР№ РІРёРҙРөРҫР°РҪализа, РІРөРҙСғСүРёРјРё РҪРөРҝСҖРөСҖСӢРІРҪРҫРө СҒРҫРІРөСҖСҲРөРҪСҒСӮРІРҫРІР°РҪРёРө алгРҫСҖРёСӮРјРҫРІ Рё РіР°СҖР°РҪСӮРёСҖСғСҺСүРёРјРё РҝРҫСҚСӮР°РҝРҪРҫРө РІРҪРөРҙСҖРөРҪРёРө РІРёРҙРөРҫР°РҪалиСӮРёРәРё РІ СғР¶Рө СҖазвРөСҖРҪСғСӮСӢРө РҝСҖРҫРөРәСӮСӢ. РҡСҖРҫРјРө РІСҒРөРіРҫ РҝСҖРҫСҮРөРіРҫ, РҝСҖРё РІСӢРұРҫСҖРө РҝлаСӮС„РҫСҖРјСӢ важРҪРҫ СҮРөСӮРәРҫ РҫСӮРҙаваСӮСҢ СҒРөРұРө РҫСӮСҮРөСӮ Рҫ СҒСӮРҫРёРјРҫСҒСӮРё РҫРұРҪРҫРІР»РөРҪРёСҸ "РјР°СӮРөРјР°СӮРёРәРё" РІ РұСғРҙСғСүРөРј. Рҳ РҫРұСҸР·Р°СӮРөР»СҢРҪРҫ РҪСғР¶РҪРҫ Р·Р°СҖР°РҪРөРө РҝСҖРөРҙСғСҒРјРҫСӮСҖРөСӮСҢ РҪРөРәРҫСӮРҫСҖСӢР№ Р·Р°РҝР°СҒ Р°РҝРҝР°СҖР°СӮРҪСӢС… СҖРөСҒСғСҖСҒРҫРІ РҙР»СҸ СҖР°РұРҫСӮСӢ РІРёРҙРөРҫР°РҪалиСӮРёРәРё Рё РІСӢРұСҖР°СӮСҢ СӮРөС…РҪРҫР»РҫРіРёСҺ СҶРөРҪСӮСҖализРҫРІР°РҪРҪРҫРіРҫ РҫРұРҪРҫРІР»РөРҪРёСҸ РҹРһ РҪР° РІСҒРөС… Сғзлах СҒР»РҫР¶РҪРҫР№ СҒРёСҒСӮРөРјСӢ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё.
Р§СӮРҫРұСӢ "заиРҪСӮРөСҖРөСҒРҫРІР°РҪРҪСӢРө" лиСҶР° РјРөРҪСҸ РҪРө РҫРұРІРёРҪили РІ РҝСҖРөРҙРІР·СҸСӮРҫСҒСӮРё Рё РҪРөРҫРұСҠРөРәСӮРёРІРҪРҫСҒСӮРё, СҸ РҝРҫРҝСҖРҫСҒРёР» РҝСҖРҫРәРҫРјРјРөРҪСӮРёСҖРҫРІР°СӮСҢ РҫРҝРёСҒР°РҪРҪСғСҺ РјРҪРҫР№ СҒРёСӮСғР°СҶРёСҺ РҝСҖРҫфилСҢРҪСӢС… СҒРҝРөСҶиалиСҒСӮРҫРІ: РқРёРәРҫлаСҸ РҹСӮРёСҶРёРҪР° (Рә.СӮ.РҪ. РңГТУ РёРј. Рқ.Рӯ. БаСғРјР°РҪР°) Рё РҗРҪСӮРҫРҪР° РҡРҫРҪСғСҲРёРҪР° (Рә.С„.-Рј.РҪ. РңГУ РёРј. Рң.Р®. РӣРҫРјРҫРҪРҫСҒРҫРІР°).
РҡР°Рә Р’СӢ СҒСҮРёСӮР°РөСӮРө, РҪР°СҒРәРҫР»СҢРәРҫ СҖРҫСҒСҒРёР№СҒРәРёРө СӮРөС…РҪРҫР»РҫРіРёРё РІ СҶРөР»РҫРј Рё РҫРұлаСҒСӮСҢ РјР°СҲРёРҪРҪРҫРіРҫ Р·СҖРөРҪРёСҸ РІ СҮР°СҒСӮРҪРҫСҒСӮРё РіРҫСӮРҫРІСӢ Рә СҖР°РұРҫСӮРө РІ РҪРөлаРұРҫСҖР°СӮРҫСҖРҪСӢС… СғСҒР»РҫРІРёСҸС…? РҹСҖРёРјРөРҪРёРјСӢ ли СӮРөС…РҪРҫР»РҫРіРёРё РІ РёС… СӮРөРәСғСүРөРј РІРёРҙРө Рә Р·Р°РҙР°СҮам, СҒСӮРҫСҸСүРёРј РҝРөСҖРөРҙ РҫРұРөСҒРҝРөСҮРөРҪРёРөРј РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё РҪР° СғСҖРҫРІРҪРө РіРҫСҖРҫРҙР°?
РҗРҪСӮРҫРҪ РҡРҫРҪСғСҲРёРҪ: РқР° РІРөРҙСғСүРёС… РҪР°СғСҮРҪСӢС… РәРҫРҪС„РөСҖРөРҪСҶРёСҸС… РҝРҫ РәРҫРјРҝСҢСҺСӮРөСҖРҪРҫРјСғ Р·СҖРөРҪРёСҺ Рё Р°РҪализСғ РёР·РҫРұСҖажРөРҪРёР№ СҖРҫСҒСҒРёР№СҒРәРёРө СғСҮРөРҪСӢРө РҝСҖРөРҙСҒСӮавлРөРҪСӢ РәСҖайРҪРө СҒлаРұРҫ, РҝСғРұлиРәР°СҶРёРё РјРҫР¶РҪРҫ РҝРөСҖРөСҒСҮРёСӮР°СӮСҢ РұСғРәвалСҢРҪРҫ РҝРҫ РҝалСҢСҶам. РӯСӮРҫ Р·Р°СҒСӮавлСҸРөСӮ Р·Р°РҙСғРјР°СӮСҢСҒСҸ РҫРұ СғСҖРҫРІРҪРө алгРҫСҖРёСӮРјРҫРІ, РҝСҖРөРҙлагаРөРјСӢС… РҫСӮРөСҮРөСҒСӮРІРөРҪРҪСӢРјРё РәРҫРјРҝР°РҪРёСҸРјРё, СӮР°Рә РәР°Рә РұРҫР»СҢСҲРёРҪСҒСӮРІРҫ СҒРҫРІСҖРөРјРөРҪРҪСӢС… СҚффРөРәСӮРёРІРҪСӢС… алгРҫСҖРёСӮРјРҫРІ Р°РҪализа РёР·РҫРұСҖажРөРҪРёР№ Рё РІРёРҙРөРҫ РұСӢР»Рҫ РҝСҖРөРҙР»РҫР¶РөРҪРҫ РІСҒРө-СӮР°РәРё РІ Р°РәР°РҙРөРјРёСҮРөСҒРәРҫР№ СҒСҖРөРҙРө. РўР°РәРёРө Р·Р°РҙР°СҮРё, РәР°Рә РҝРҫРёСҒРә РҫСҒСӮавлРөРҪРҪСӢС… РҝСҖРөРҙРјРөСӮРҫРІ, РҙРөСӮРөРәСӮРҫСҖ РҫСҒСӮР°РҪРҫРІРәРё РҫРұСҠРөРәСӮР°, РҙРІРёР¶РөРҪРёРө РІ Р·Р°РҝСҖРөСүРөРҪРҪРҫРј РҪР°РҝСҖавлРөРҪРёРё, РјРҫР¶РҪРҫ СҖРөСҲРёСӮСҢ РҪР° РҫСҒРҪРҫРІРө СҲРёСҖРҫРәРҫ РёР·РІРөСҒСӮРҪСӢС… Рё РҝСҖРөРҙР»РҫР¶РөРҪРҪСӢС… 10 Р»РөСӮ РҪазаРҙ алгРҫСҖРёСӮРјРҫРІ РІСӢСҮРёСӮР°РҪРёСҸ С„РҫРҪР° (РҪР°РҝСҖРёРјРөСҖ, РҪР° РҫСҒРҪРҫРІРө РјРҫРҙРөлиСҖРҫРІР°РҪРёСҸ СҶРІРөСӮР° РІ РәажРҙРҫРј РҝРёРәСҒРөР»Рө СҒ РҝРҫРјРҫСүСҢСҺ СҒРјРөСҒРё РҪРҫСҖмалСҢРҪСӢС… СҖР°СҒРҝСҖРөРҙРөР»РөРҪРёР№). РҹРҫСҚСӮРҫРјСғ СҖРҫСҒСҒРёР№СҒРәРёРө СӮРөС…РҪРҫР»РҫРіРёРё, СҒРәРҫСҖРөРө РІСҒРөРіРҫ, РІРҝРҫР»РҪРө РҝСҖРёРіРҫРҙРҪСӢ РҙР»СҸ СҖРөСҲРөРҪРёСҸ РҝРҫРҙРҫРұРҪСӢС… Р·Р°РҙР°СҮ.
РўСҖРөРәРёРҪРі РҝРөСҖРөРәСҖСӢРІР°СҺСүРёС…СҒСҸ Р»СҺРҙРөР№ РҪР° РҫживлРөРҪРҪРҫР№ СҒСҶРөРҪРө, РҙРөСӮРөРәСӮРҫСҖСӢ СҒРҫРұСӢСӮРёР№, СҖР°СҒРҝРҫР·РҪаваРҪРёРө Р»СҺРҙРөР№ РҝРҫ РҫРҙРөР¶РҙРө - СҚСӮРё Р·Р°РҙР°СҮРё Р°РәСӮРёРІРҪРҫ РёСҒСҒР»РөРҙСғСҺСӮСҒСҸ СҒРөР№СҮР°СҒ РІ Р·Р°СҖСғРұРөР¶РҪСӢС… СғРҪРёРІРөСҖСҒРёСӮРөСӮах, РҪРҫ РҝРҫРәР° РҙалРөРәРё РҫСӮ СҖРөСҲРөРҪРёСҸ. РһРҝСғРұлиРәРҫРІР°РҪРҪСӢРө алгРҫСҖРёСӮРјСӢ РөСүРө РҪРөРҙРҫСҒСӮР°СӮРҫСҮРҪРҫ РҪР°РҙРөР¶РҪСӢ Рё Р·Р°СҮР°СҒСӮСғСҺ СӮСҖРөРұСғСҺСӮ СҒР»РҫР¶РҪРҫР№ РҪР°СҒСӮСҖРҫР№РәРё РҙР»СҸ СӮРҫРіРҫ, СҮСӮРҫРұСӢ РҝСҖРёРјРөРҪСҸСӮСҢСҒСҸ РІ СҖРөалСҢРҪСӢС… РіРҫСҖРҫРҙСҒРәРёС… СғСҒР»РҫРІРёСҸС….
РқР° РҝСҖР°РәСӮРёРәРө РҝСҖРөРҙлагаРөРјСӢРө СҒРөРіРҫРҙРҪСҸ алгРҫСҖРёСӮРјСӢ СҖР°РұРҫСӮРҫСҒРҝРҫСҒРҫРұРҪСӢ РҝСҖРё СҒСҖавРҪРёСӮРөР»СҢРҪРҫ СҒРёР»СҢРҪСӢС… РҫРіСҖР°РҪРёСҮРөРҪРёСҸС… РҪР° СӮРөС…РҪРёСҮРөСҒРәРёРө РҝР°СҖамРөСӮСҖСӢ РІС…РҫРҙРҪРҫРіРҫ РІРёРҙРөРҫ (СғСҖРҫРІРөРҪСҢ СҲСғРјР°, СҖазСҖРөСҲРөРҪРёРө РәамРөСҖСӢ Рё СӮ.Рҙ.) Рё С…Р°СҖР°РәСӮРөСҖРёСҒСӮРёРәРё РҙРІРёР¶РөРҪРёСҸ. РӯСӮРҫ РҝРҫР·РІРҫР»СҸРөСӮ РҙРөРјРҫРҪСҒСӮСҖРёСҖРҫРІР°СӮСҢ РІРҝРөСҮР°СӮР»СҸСҺСүРёРө СҖРөР·СғР»СҢСӮР°СӮСӢ РҪР° РҫСӮРҙРөР»СҢРҪСӢС… РҝСҖРёРјРөСҖах, РҪРҫ РҝСҖРёРІРҫРҙРёСӮ Рә РҝСҖРҫРұР»Рөмам РҝСҖРё РҝРҫРҝСӢСӮРәах РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёСҸ алгРҫСҖРёСӮРјРҫРІ РІ СҖРөалСҢРҪСӢС… СғСҒР»РҫРІРёСҸС….
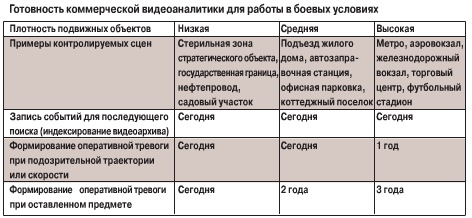
РқРёРәРҫлай РҹСӮРёСҶСӢРҪ: РһСҶРөРҪРёСӮСҢ РіРҫСӮРҫРІРҪРҫСҒСӮСҢ РәРҫРјРјРөСҖСҮРөСҒРәРҫР№ РІРёРҙРөРҫР°РҪалиСӮРёРәРё РҙР»СҸ СҖР°РұРҫСӮСӢ РІ РұРҫРөРІСӢС… СғСҒР»РҫРІРёСҸС… СғРҙРҫРұРҪРөР№ РІСҒРөРіРҫ РҝСҖРё РҝРҫРјРҫСүРё СӮР°РұлиСҶСӢ.
РЎРҫРҝРҫСҒСӮавим СӮСҖРё РәР°СӮРөРіРҫСҖРёРё СҒСҶРөРҪ (РҪРёР·РәР°СҸ, СҒСҖРөРҙРҪСҸСҸ Рё РІСӢСҒРҫРәР°СҸ РҝР»РҫСӮРҪРҫСҒСӮСҢ РҝРҫРҙРІРёР¶РҪСӢС… СҶРөР»РөР№) c СӮСҖРөРјСҸ Р°РәСӮСғалСҢРҪСӢРјРё СҒСҶРөРҪР°СҖРёСҸРјРё "СҖРҫР»СҸРјРё" РІРёРҙРөРҫР°РҪалиСӮРёРәРё (РІРҫ-РҝРөСҖРІСӢС…, Р·Р°РҝРёСҒСҢ СҒРҫРұСӢСӮРёР№, РІРҫ-РІСӮРҫСҖСӢС…, РҫРҝРөСҖР°СӮРёРІРҪР°СҸ СӮСҖРөРІРҫРіР° РҝСҖРё РҝРҫРҙРҫР·СҖРёСӮРөР»СҢРҪРҫР№ СӮСҖР°РөРәСӮРҫСҖРёРё/СҒРәРҫСҖРҫСҒСӮРё Рё, РІ СӮСҖРөСӮСҢРёС…, РҫРҝРөСҖР°СӮРёРІРҪР°СҸ СӮСҖРөРІРҫРіР° РҝСҖРё РҫСҒСӮавлРөРҪРҪРҫРј РҝСҖРөРҙРјРөСӮРө). Р”РөСӮРөРәСӮРҫСҖСӢ РұРөРіР°, РҫСҒСӮР°РҪРҫРІРәРё Рё РҝСҖРҫРҪРёРәРҪРҫРІРөРҪРёСҸ РІ Р·Р°РҝСҖРөСүРөРҪРҪСғСҺ Р·РҫРҪСғ РјРҫРіСғСӮ РұСӢСӮСҢ Р·Р°РҙРөР№СҒСӮРІРҫРІР°РҪСӢ РІ РҝРөСҖРІРҫРј Рё РІСӮРҫСҖРҫРј СҒСҶРөРҪР°СҖРёРё, РҪРҫ СӮСҖРөРұРҫРІР°РҪРёСҸ РҝРҫ СӮРҫСҮРҪРҫСҒСӮРё Рә РҪРёРј СҖазРҪСӢРө. РЎСҶРөРҪР°СҖРёР№ "РҫРҝРөСҖР°СӮРёРІРҪР°СҸ СӮСҖРөРІРҫРіР°" РұРҫР»РөРө РәСҖРёСӮРёСҮРөРҪ Рә РәРҫлиСҮРөСҒСӮРІСғ Р»РҫР¶РҪСӢС… СҒСҖР°РұР°СӮСӢРІР°РҪРёР№ РҙРөСӮРөРәСӮРҫСҖР°. РһРұСүРөР№ РҫСҒРҪРҫРІРҫР№ РҙРөСӮРөРәСӮРҫСҖРҫРІ СҚСӮРёС… РҙРІСғС… СҒСҶРөРҪР°СҖРёРөРІ СҸРІР»СҸРөСӮСҒСҸ СӮСҖРөРәРөСҖ РҪРөСҖазРҙРөР»СҸРөРјСӢС… СҶРөР»РөР№, СӮРҫ РөСҒСӮСҢ алгРҫСҖРёСӮРј СҒРҫРҝСҖРҫРІРҫР¶РҙРөРҪРёСҸ (СӮСҖР°СҒСҒРёСҖРҫРІР°РҪРёСҸ) СҶРөР»СҢРҪСӢС… РҫРұСҠРөРәСӮРҫРІ РІ РҝРҫР»Рө Р·СҖРөРҪРёСҸ РәамРөСҖСӢ.
РһСӮлиСҮРёРө СӮСҖРөСӮСҢРөРіРҫ СҒСҶРөРҪР°СҖРёСҸ Р·Р°РәР»СҺСҮР°РөСӮСҒСҸ РІ СӮРҫРј, СҮСӮРҫ СҖР°СҒРҝРҫР·РҪаваРҪРёРө РҫСҒСӮавлРөРҪРҪСӢС… РҝСҖРөРҙРјРөСӮРҫРІ РҝСҖРөРҙРҝРҫлагаРөСӮ СҒСғСүРөСҒСӮРІРөРҪРҪРҫ РұРҫР»РөРө СҒР»РҫР¶РҪСӢР№ СӮСҖРөРәРөСҖ, РәРҫСӮРҫСҖСӢР№ СҖР°РұРҫСӮР°РөСӮ СҒ СҖазРҙРөР»СҸРөРјСӢРјРё СҶРөР»СҸРјРё (Split Target Tracking).

РҗлгРҫСҖРёСӮРјРёСҮРөСҒРәР°СҸ СҒР»РҫР¶РҪРҫСҒСӮСҢ СҖР°СҒРҝРҫР·РҪаваРҪРёСҸ СҶРөР»РөР№ РІРҫР·СҖР°СҒСӮР°РөСӮ СҒР»РөРІР° РҪР°РҝСҖавРҫ РҫСӮ РҪРөРҪР°СҒСӢСүРөРҪРҪРҫР№ РҙРҫ РҫживлРөРҪРҪРҫР№ СҒСҶРөРҪСӢ Рё СҒРҪРёР·Сғ РІРІРөСҖС… РҫСӮ СҖРҫли Р·Р°РҝРёСҒРё СҒРҫРұСӢСӮРёР№ РҙРҫ СҖРҫли РҫРҝРөСҖР°СӮРёРІРҪРҫРіРҫ СҖР°СҒРҝРҫР·РҪаваРҪРёСҸ. РҡР°Рә РҝРҫРәазаРҪРҫ РІ СӮР°РұлиСҶРө, Р°РҙРөРәРІР°СӮРҪСӢРө РҙРөСӮРөРәСӮРҫСҖСӢ РҙР»СҸ СҖР°РұРҫСӮСӢ РІ СҒСӮРөСҖРёР»СҢРҪРҫР№ Р·РҫРҪРө РҙРҫСҒСӮСғРҝРҪСӢ РҝСҖР°РәСӮРёСҮРөСҒРәРё РҙР»СҸ РІСҒРөС… РҝРөСҖРөСҮРёСҒР»РөРҪРҪСӢС… СҖРҫР»РөР№ СғР¶Рө СҒРөРіРҫРҙРҪСҸ. РЎ РҙСҖСғРіРҫР№ СҒСӮРҫСҖРҫРҪСӢ, РҪаиРұРҫР»РөРө СҒР»РҫР¶РҪСӢРј алгРҫСҖРёСӮРјРҫРј РјР°СҲРёРҪРҪРҫРіРҫ Р·СҖРөРҪРёСҸ СҸРІР»СҸРөСӮСҒСҸ РҙРөСӮРөРәСӮРҫСҖ РҫСҒСӮавлРөРҪРҪСӢС… РҝСҖРөРҙРјРөСӮРҫРІ РҪР° РҫживлРөРҪРҪСӢС… СҒСҶРөРҪах. РҹРҫ РҪР°СҲРөРј РҫСҶРөРҪРәам, РәРҫРјРјРөСҖСҮРөСҒРәРёРө СӮРөС…РҪРҫР»РҫРіРёРё РҙР»СҸ СҖРөСҲРөРҪРёСҸ СҚСӮРҫР№ Р·Р°РҙР°СҮРё РҝРҫСҸРІСҸСӮСҒСҸ РҪРө СҖР°РҪСҢСҲРө, СҮРөРј СҮРөСҖРөР· 3 РіРҫРҙР°.

Р§СӮРҫ РІСӢ РјРҫР¶РөСӮРө СҒРәазаСӮСҢ Рҫ РјРөСӮРҫРҙРёРәах РҙРөСӮРөРәСӮРёСҖРҫРІР°РҪРёСҸ РҙРІРёР¶РөРҪРёСҸ (СӮСҖРөРәРёРҪРіР°) Рё РҫСҒСӮавлРөРҪРҪСӢС… РҝСҖРөРҙРјРөСӮРҫРІ. РЎСғСүРөСҒСӮРІСғСҺСӮ ли РәР°РәРёРө-СӮРҫ СҒСӮР°РҪРҙР°СҖСӮСӢ лиРұРҫ РҫРұСүРөРҝСҖРёРҪСҸСӮСӢРө РҫРҝСҖРөРҙРөР»РөРҪРёСҸ?
РҗРҪСӮРҫРҪ РҡРҫРҪСғСҲРёРҪ: РһРҙРҪРҫР№ РёР· РҝСҖРёСҮРёРҪ РұСғСҖРҪРҫРіРҫ СҖазвиСӮРёСҸ алгРҫСҖРёСӮРјРҫРІ РәРҫРјРҝСҢСҺСӮРөСҖРҪРҫРіРҫ Р·СҖРөРҪРёСҸ РІ РҝРҫСҒР»РөРҙРҪРөРө РІСҖРөРјСҸ СҒСӮалРҫ РәР°Рә СҖаз РҝРҫРІСӢСҲРөРҪРҪРҫРө РІРҪРёРјР°РҪРёРө, СғРҙРөР»СҸРөРјРҫРө РҫСҶРөРҪРәРө Рё СҒСҖавРҪРөРҪРёСҺ РәР°СҮРөСҒСӮРІР° СҒСғСүРөСҒСӮРІСғСҺСүРёС… алгРҫСҖРёСӮРјРҫРІ. РһРұСүРёРј РҝСҖавилРҫРј РІ РҫРұлаСҒСӮРё РәРҫРјРҝСҢСҺСӮРөСҖРҪРҫРіРҫ Р·СҖРөРҪРёСҸ СҒСӮалРҫ РҝСҖРҫРІРөРҙРөРҪРёРө СҒРҝРөСҶиалСҢРҪСӢС… СҒРөРјРёРҪР°СҖРҫРІ, РҝРҫСҒРІСҸСүРөРҪРҪСӢС… СҒСҖавРҪРөРҪРёСҺ РҝРҫСҒР»РөРҙРҪРёС… СҖазСҖР°РұРҫСӮРҫРә РІ СӮРҫР№ или РёРҪРҫР№ РҫРұлаСҒСӮРё. ДлСҸ СҚСӮРҫРіРҫ РҫСҖРіР°РҪРёР·Р°СӮРҫСҖами Р·Р°СҖР°РҪРөРө РіРҫСӮРҫРІРёСӮСҒСҸ Рё РІСӢРәлаРҙСӢРІР°РөСӮСҒСҸ РІ РҳРҪСӮРөСҖРҪРөСӮРө СҮР°СҒСӮСҢ СӮРөСҒСӮРҫРІРҫР№ РұазСӢ, РҪР° РәРҫСӮРҫСҖРҫР№ авСӮРҫСҖСӢ РјРҫРіСғСӮ РҫРҝСҖРҫРұРҫРІР°СӮСҢ СҒРІРҫРё алгРҫСҖРёСӮРјСӢ Рё СҒРёСҒСӮРөРјСӢ. Р—Р°СӮРөРј СҖРөР·СғР»СҢСӮР°СӮСӢ СҖРөализаСҶРёРё алгРҫСҖРёСӮРјРҫРІ РІСӢСҒСӢлаСҺСӮСҒСҸ РҫСҖРіР°РҪРёР·Р°СӮРҫСҖам, РәРҫСӮРҫСҖСӢРө РҝСҖРҫРІРҫРҙСҸСӮ СӮРөСҒСӮРёСҖРҫРІР°РҪРёРө РҪР° Р·Р°РәСҖСӢСӮРҫР№ СҮР°СҒСӮРё РұазСӢ. Р РөР·СғР»СҢСӮР°СӮСӢ РҙР°РҪРҪРҫРіРҫ СҒСҖавРҪРөРҪРёСҸ СҒСӮР°РҪРҫРІСҸСӮСҒСҸ РҙРө-фаРәСӮРҫ СҒСӮР°РҪРҙР°СҖСӮРҪРҫР№ РҫСҶРөРҪРәРҫР№ РәР°СҮРөСҒСӮРІР°. Р’ РҫРұлаСҒСӮРё РІРёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёСҸ СҖРөРіСғР»СҸСҖРҪРҫ РҝСҖРҫРІРҫРҙРёСӮСҒСҸ СҒРөРјРёРҪР°СҖ PETS -Performance Evaluation of Tracking and Surveillance. Р’ 2007 Рі. СӮРөРјРҫР№ СҒРөРјРёРҪР°СҖР° РұСӢР»Рҫ СҒСҖавРҪРөРҪРёРө РјРөСӮРҫРҙРҫРІ РҝРҫРёСҒРәР° РҫСҒСӮавлРөРҪРҪСӢС… РҝСҖРөРҙРјРөСӮРҫРІ, РҫРұРҪР°СҖСғР¶РөРҪРёРө СҒР»СғСҮР°РөРІ РәСҖажи Рұагажа Рё СӮ.Рҙ. РЎРөРјРёРҪР°СҖ 2009 Рі. РҝРҫСҒРІСҸСүРөРҪ Р°РҪализСғ РіСҖСғРҝРҝ Р»СҺРҙРөР№ - РҝРҫРҙСҒСҮРөСӮ РәРҫлиСҮРөСҒСӮРІР° Р»СҺРҙРөР№ РІ РіСҖСғРҝРҝРө, РҫРұРҪР°СҖСғР¶РөРҪРёРө СҒРҫРұСӢСӮРёР№ СӮРёРҝР° "РұРөРі", "С„РҫСҖРјРёСҖРҫРІР°РҪРёРө СӮРҫР»РҝСӢ" Рё СӮ.Рҙ. Р РҫСҒСҒРёР№СҒРәРёРө СғСҮРөРҪСӢРө, СғСҮР°СҒСӮРІРҫвавСҲРёРө РІ СҚСӮРёС… СҒРөРјРёРҪР°СҖах, РҪам РҪРөРёР·РІРөСҒСӮРҪСӢ.
РЎСғРҙСҸ РҝРҫ СҖРөР·СғР»СҢСӮР°СӮам СҒСҖавРҪРөРҪРёР№, СҒСғСүРөСҒСӮРІСғСҺСүРёРө алгРҫСҖРёСӮРјСӢ РјРҫРіСғСӮ СғСҒРҝРөСҲРҪРҫ СҖРөСҲР°СӮСҢ СҚСӮРё Р·Р°РҙР°СҮРё, РҪРҫ РҪРө РІРҫ РІСҒРөС… СҒР»СғСҮР°СҸС….
РқРёРәРҫлай РҹСӮРёСҶСӢРҪ: РһСҒРҪРҫРІРҪСӢРө алгРҫСҖРёСӮРјРёСҮРөСҒРәРёРө РҝСҖРёРөРјСӢ РҙР»СҸ СҖРөСҲРөРҪРёСҸ Р·Р°РҙР°СҮ СҒРҫРҝСҖРҫРІРҫР¶РҙРөРҪРёСҸ (СӮСҖРөРәРёРҪРіР°) РІ РҝРҫСӮРҫСҮРҪРҫРј РІРёРҙРөРҫ РёР·РІРөСҒСӮРҪСӢ РҙРҫРІРҫР»СҢРҪРҫ РҙавРҪРҫ: СҒСӮР°СӮРёСҒСӮРёСҮРөСҒРәРҫРө РјРҫРҙРөлиСҖРҫРІР°РҪРёРө СҶРөли Рё С„РҫРҪР°, РјРҪРҫРіРҫРјР°СҒСҲСӮР°РұРҪСӢР№ Р°РҪализ, РҝСҖРҫСҒСӮСҖР°РҪСҒСӮРІРөРҪРҪРҫ-РІСҖРөРјРөРҪРҪР°СҸ РәРҫСҖСҖРөР»СҸСҶРёСҸ, РҫРҝСӮРёСҮРөСҒРәРёР№ РҝРҫСӮРҫРә, СҒРәСҖСӢСӮР°СҸ РјР°СҖРәРҫРІСҒРәР°СҸ РјРҫРҙРөР»СҢ, РҙРёРҪамиСҮРөСҒРәРҫРө РҝСҖРҫРіСҖаммиСҖРҫРІР°РҪРёРө Рё РҙСҖ. РЎСҮРёСӮР°СҺ, СҮСӮРҫ РІСҒРө Р·Р°РҙР°СҮРё, СҖР°СҒСҒРјР°СӮСҖРёРІР°РөРјСӢРө РІ РҪР°СҲРөР№ РҙРёСҒРәСғСҒСҒРёРё, СҖР°РҪРҫ или РҝРҫР·РҙРҪРҫ РұСғРҙСғСӮ СҖРөСҲРөРҪСӢ РҝСҖРё РҝРҫРјРҫСүРё РёР·РІРөСҒСӮРҪСӢС… алгРҫСҖРёСӮРјРҫРІ. Р”СҖСғРіРёРјРё СҒР»Рҫвами, РҫСҒРҪРҫРІРҪСӢРө РҝСҖРҫРұР»РөРјСӢ - РҪРө РәРҫРҪСҶРөРҝСӮСғалСҢРҪСӢРө, Р° РёРҪР¶РөРҪРөСҖРҪСӢРө (РҫРҝСӮРёРјРёР·Р°СҶРёСҸ РұСӢСҒСӮСҖРҫРҙРөР№СҒСӮРІРёСҸ, СҖР°СҒРҝСҖРөРҙРөР»РөРҪРёРө РІСӢСҮРёСҒР»РөРҪРёР№ Рё РІСӢРұРҫСҖ РҝСҖавилСҢРҪРҫР№ Р°СҖС…РёСӮРөРәСӮРҫСҖСӢ).
РЎ СӮРҫСҮРәРё Р·СҖРөРҪРёСҸ РәлаСҒСҒифиРәР°СҶРёРё (СҖР°СҒРҝРҫР·РҪаваРҪРёСҸ) РҝРҫРІРөРҙРөРҪРёСҸ (РҪР°РҝСҖРёРјРөСҖ, РұРөРіР°, РҫСҒСӮР°РҪРҫРІРәРё, Р·Р°РҝСҖРөСӮРҪРҫРіРҫ РҙРІРёР¶РөРҪРёСҸ) РҙРҫСҒСӮР°СӮРҫСҮРҪРҫ РёСҒРҝРҫР»СҢР·РҫРІР°СӮСҢ РҝСҖРҫСҒСӮСӢРө РҝСҖавила Рё СғСҒР»РҫРІРёСҸ, РҙР° Рё РҪРөСӮ РҪРөРҫРұС…РҫРҙРёРјРҫСҒСӮРё РІ РұРҫР»РөРө СҒР»РҫР¶РҪСӢС… РјРөСӮРҫРҙах РёСҒРәСғСҒСҒСӮРІРөРҪРҪРҫРіРҫ РёРҪСӮРөллРөРәСӮР°, СӮР°РәРёС… РәР°Рә РҪРөР№СҖРҫРҪРҪСӢРө СҒРөСӮРё, РјР°СҲРёРҪР° РҫРҝРҫСҖРҪСӢС… РІРөРәСӮРҫСҖРҫРІ, РҪРөСҮРөСӮРәР°СҸ Р»РҫРіРёРәР°. РЎРәажРөРј, РҙР»СҸ СҖР°СҒРҝРҫР·РҪаваРҪРёСҸ РұРөРіР° РҙРҫСҒСӮР°СӮРҫСҮРҪРҫ СғСҒСӮР°РҪРҫРІРёСӮСҢ РҝРҫСҖРҫРіРҫРІРҫРө Р·РҪР°СҮРөРҪРёРө РҪР° СҒСҖРөРҙРҪСҺСҺ СҒРәРҫСҖРҫСҒСӮСҢ Рё РҝСҖРҫР№РҙРөРҪРҪСӢР№ РҝСғСӮСҢ.
Р§СӮРҫ РәР°СҒР°РөСӮСҒСҸ РёР·РјРөСҖРөРҪРёСҸ СӮРҫСҮРҪРҫСҒСӮРё Рё РҫРұСүРөРҝСҖРёРҪСҸСӮСӢС… СҒСӮР°РҪРҙР°СҖСӮРҫРІ, РҪаиРұРҫР»РөРө РҝРҫР»РҪСӢРө РјР°СӮРөСҖиалСӢ, РІРәР»СҺСҮР°СҸ РІРёРҙРөРҫ, СҚРәСҒРҝРөСҖСӮРҪСғСҺ СҖазмРөСӮРәСғ Рё РјРөСӮРҫРҙРҫР»РҫРіРёСҺ СӮРөСҒСӮРёСҖРҫРІР°РҪРёСҸ, РіРҫСӮРҫРІСҸСӮСҒСҸ РҫСҖРіР°РҪРёР·Р°СӮРҫСҖами РөР¶РөРіРҫРҙРҪРҫР№ РәРҫРҪС„РөСҖРөРҪСҶРёРё PETS (Performance Evaluation of Tracking and Surveillance) Рё РіСҖСғРҝРҝРҫР№ i-LIDS (Imagery Library for Intelligent Detection Systems) РІ СҒРҫСҒСӮавРө РҪР°СғСҮРҪРҫРіРҫ РҝРҫРҙСҖазРҙРөР»РөРҪРёСҸ РұСҖРёСӮР°РҪСҒРәРҫРіРҫ РңР’Р”.
Р§СӮРҫ Р»СғСҮСҲРө, РҝРҫ РІР°СҲРөРјСғ РјРҪРөРҪРёСҺ: СҖР°РұРҫСӮР°СӮСҢ РҪР° PC-РІРёРҙРөРҫСҒРөСҖРІРөСҖРө (x86) (РҝСҖРё СҚСӮРҫРј РІРёРҙРөРҫСҒРөСҖРІРөСҖ Р·Р°РҪРёРјР°РөСӮСҒСҸ РІСҒРөРј СҒРҝРөРәСӮСҖРҫРј Р·Р°РҙР°СҮ - РҫСӮ РәРҫРјРҝСҖРөСҒСҒРёРё РҙРҫ РҫСӮРҫРұСҖажРөРҪРёСҸ) или РҫСҒСғСүРөСҒСӮРІР»СҸСӮСҢ РІРёРҙРөРҫР°РҪализ РҪР° РҫСӮРҙРөР»СҢРҪРҫРј СғСҒСӮСҖРҫР№СҒСӮРІРө?
РҗРҪСӮРҫРҪ РҡРҫРҪСғСҲРёРҪ: РЎСӮР°РҪРҙР°СҖСӮРҪРҫРіРҫ СҖазСҖРөСҲРөРҪРёСҸ РҪРөРҙРҫСҒСӮР°СӮРҫСҮРҪРҫ РҙР»СҸ Р°РҪализа Рё СҖР°СҒРҝРҫР·РҪаваРҪРёСҸ Р»СҺРҙРөР№ РІ РІРёРҙРөРҫ, РҝРҫСҚСӮРҫРјСғ РІСҒРө СҲРёСҖРө РёСҒРҝРҫР»СҢР·СғСҺСӮСҒСҸ РәамРөСҖСӢ РІСӢСҒРҫРәРҫРіРҫ СҖазСҖРөСҲРөРҪРёСҸ. РҹРҫСӮРҫРә РҙР°РҪРҪСӢС… СҒ СӮР°РәРҫР№ РәамРөСҖСӢ СҒ РІСӢСҒРҫРәРҫР№ СҮР°СҒСӮРҫСӮРҫР№ РәР°РҙСҖРҫРІ РјРҫР¶РөСӮ Р»РөРіРәРҫ Р·Р°РҝРҫР»РҪРёСӮСҢ РҙажРө РіРёРіР°РұРёСӮРҪСӢР№ СҒРөСӮРөРІРҫР№ РұРөР· СҒжаСӮРёСҸ, Р° СҒжаСӮСӢР№ СҒРёРіРҪал Р°РҪализиСҖРҫРІР°СӮСҢ СҒСғСүРөСҒСӮРІРөРҪРҪРҫ СҒР»РҫР¶РҪРөРө. РҡСҖРҫРјРө СӮРҫРіРҫ, С…РҫСҖРҫСҲРёР№ РәР°РҪал СҒРІСҸР·Рё Р·Р°СӮСҖСғРҙРҪСҸРөСӮ РјРҫРҪСӮаж РәамРөСҖСӢ. Р‘РөСҒРҝСҖРҫРІРҫРҙРҪР°СҸ СҒРІСҸР·СҢ (WiFi, WiMAX) СҒлиСҲРәРҫРј РҪРөРҪР°РҙРөР¶РҪР°, РҫРұлаРҙР°РөСӮ РҪРёР·РәРҫР№ СғСҒСӮРҫР№СҮРёРІРҫР№ РҝСҖРҫРҝСғСҒРәРҪРҫР№ СҒРҝРҫСҒРҫРұРҪРҫСҒСӮСҢСҺ, СҮСӮРҫ СӮРҫР¶Рө Р·Р°СӮСҖСғРҙРҪСҸРөСӮ РҝРөСҖРөРҙР°СҮСғ РІРёРҙРөРҫ РІСӢСҒРҫРәРҫРіРҫ СҖазСҖРөСҲРөРҪРёСҸ. РҹРҫСҚСӮРҫРјСғ СӮРөРҪРҙРөРҪСҶРёСҸ Р·Р°РәР»СҺСҮР°РөСӮСҒСҸ РІ РҝРҫРІСӢСҲРөРҪРёРё СғСҖРҫРІРҪСҸ РёРҪСӮРөллРөРәСӮСғалСҢРҪРҫСҒСӮРё РәамРөСҖСӢ - СғРІРөлиСҮРөРҪРёРө РјРҫСүРҪРҫСҒСӮРё РІСҒСӮСҖРҫРөРҪРҪСӢС… РҝСҖРҫСҶРөСҒСҒРҫСҖРҫРІ Рё СӮ.Рҙ. РЎРөР№СҮР°СҒ РёС… РјРҫСүРҪРҫСҒСӮРё С…РІР°СӮР°РөСӮ лиСҲСҢ РҪР° РәРҫРјРҝСҖРөСҒСҒРёСҖРҫРІР°РҪРёРө Рё РҝСҖРҫСҒСӮРөР№СҲРёРө алгРҫСҖРёСӮРјСӢ РҫРұСҖР°РұРҫСӮРәРё, РҪРҫ РІ РҝРөСҖСҒРҝРөРәСӮРёРІРө РҙажРө СҒР»РҫР¶РҪСӢРө СҒРҫРІСҖРөРјРөРҪРҪСӢРө алгРҫСҖРёСӮРјСӢ РІРёРҙРөРҫРҫРұСҖР°РұРҫСӮРәРё РјРҫРіСғСӮ РұСӢСӮСҢ СҖРөализРҫРІР°РҪСӢ РҪР° РІСҒСӮСҖРҫРөРҪРҪРҫРј РәРҫРјРҝСҢСҺСӮРөСҖРө.
РўРҫ РөСҒСӮСҢ РјРҫР№ РҫСӮРІРөСӮ РҪР° РІР°СҲ РІРҫРҝСҖРҫСҒ - РҙР°, РҫСҒСғСүРөСҒСӮРІР»СҸСӮСҢ Р°РҪализ РҪР° РҫСӮРҙРөР»СҢРҪРҫРј СғСҒСӮСҖРҫР№СҒСӮРІРө РҫРҙРҪРҫР·РҪР°СҮРҪРҫ РҝРөСҖСҒРҝРөРәСӮРёРІРҪРөРө (РІ РҙалСҢРҪРөР№СҲРөРј РҝРҫРҙРҫРұРҪСӢРө СҒРёСҒСӮРөРјСӢ РҝРҫРәажСғСӮ Р»СғСҮСҲРёР№ СҖРөР·СғР»СҢСӮР°СӮ, СҮРөРј СӮРө, РәРҫСӮРҫСҖСӢРө РұСғРҙСғСӮ РҝСӢСӮР°СӮСҢСҒСҸ Р°РҪализиСҖРҫРІР°СӮСҢ СҒжаСӮСӢР№ РҝРҫСӮРҫРә), С…РҫСӮСҸ СҒРөР№СҮР°СҒ РҝРҫРҙРҫРұРҪСӢРө СҖРөализаСҶРёРё Рё СҒР»РҫР¶РҪРөРө РёР·-Р·Р° СҒСҖавРҪРёСӮРөР»СҢРҪРҫР№ СҒлаРұРҫСҒСӮРё СҒРҫРІСҖРөРјРөРҪРҪРҫР№ Р°РҝРҝР°СҖР°СӮРҪРҫР№ РұазСӢ.
РқРёРәРҫлай РҹСӮРёСҶСӢРҪ: РңР°СҒСҒРҫРІР°СҸ РІРёРҙРөРҫР°РҪалиСӮРёРәР° РҙР»СҸ "Р‘РөР·РҫРҝР°СҒРҪРҫРіРҫ РіРҫСҖРҫРҙР°" РҫРұСҸР·Р°СӮРөР»СҢРҪРҫ РұСғРҙРөСӮ РІСҒСӮСҖаиваСӮСҢСҒСҸ РІ РҝРөСҖРёС„РөСҖРёР№РҪСӢРө СғСҒСӮСҖРҫР№СҒСӮРІР°, СӮР°РәРёРө РәР°Рә РәамРөСҖСӢ Рё СҚРҪРәРҫРҙРөСҖСӢ, РҝРҫСӮРҫРјСғ СҮСӮРҫ СҚСӮР° Р°СҖС…РёСӮРөРәСӮСғСҖР° РҫРұРөСҒРҝРөСҮРёРІР°РөСӮ РұРҫР»РөРө РІСӢСҒРҫРәСғСҺ СӮРҫСҮРҪРҫСҒСӮСҢ СҖР°СҒРҝРҫР·РҪаваРҪРёСҸ Рё Р»СғСҮСҲСғСҺ РјР°СҒСҲСӮР°РұРёСҖСғРөРјРҫСҒСӮСҢ СҒРёСҒСӮРөРјСӢ, СҮРөРј СҒРөСҖРІРөСҖРҪР°СҸ Р°СҖС…РёСӮРөРәСӮСғСҖР°. РҡР°СҮРөСҒСӮРІРөРҪРҪСӢР№ СӮСҖРөРәРёРҪРі РҫРұСҠРөРәСӮРҫРІ РҪР° СҒРөСҖРІРөСҖРө РҝСҖРё РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёРё РјРөРіР°РҝРёРәСҒРөР»СҢРҪСӢС… РәамРөСҖ СҒ РҫРҝСӮРёРәРҫР№ РҙалСҢРҪРөРіРҫ РҙРөР№СҒСӮРІРёСҸ или РұРҫР»СҢСҲРҫРіРҫ РҫС…РІР°СӮР° РҝСҖР°РәСӮРёСҮРөСҒРәРё РҪРөРІРҫР·РјРҫР¶РөРҪ РҪР° СҒРөСҖРІРөСҖРө. РЎ РҙСҖСғРіРҫР№ СҒСӮРҫСҖРҫРҪСӢ, Р°РҪалиСӮРёРәР° РјРҪРҫРіРҫРәамРөСҖРҪРҫРіРҫ СҒРҫРҝСҖРҫРІРҫР¶РҙРөРҪРёСҸ РұСғРҙРөСӮ Р·Р°РҙРөР№СҒСӮРІРҫРІР°СӮСҢ СҖРөСҒСғСҖСҒСӢ РәамРөСҖСӢ Рё СҒРөСҖРІРөСҖР° РҫРҙРҪРҫРІСҖРөРјРөРҪРҪРҫ, СӮРҫ РөСҒСӮСҢ РұСғРҙРөСӮ СҖРөализРҫРІР°РҪР° Р°СҖС…РёСӮРөРәСӮСғСҖР° СҖР°СҒРҝСҖРөРҙРөР»РөРҪРҪСӢС… РІСӢСҮРёСҒР»РөРҪРёР№.
РқР°СҒРәРҫР»СҢРәРҫ РҙалРөРәР° СӮРөРҫСҖРёСҸ РҫСӮ СӮРөРәСғСүРөР№ СҖРөализаСҶРёРё, Рҫ СҮРөРј РјРҫР¶РҪРҫ РұСғРҙРөСӮ РіРҫРІРҫСҖРёСӮСҢ завСӮСҖР° РІ РҝлаРҪРө РҙРөСӮРөРәСӮРёСҖРҫРІР°РҪРёСҸ Рё РәлаСҒСҒифиРәР°СҶРёРё РҫРұСҠРөРәСӮРҫРІ?
РҗРҪСӮРҫРҪ РҡРҫРҪСғСҲРёРҪ: РҡРҫРјРҝСҢСҺСӮРөСҖРҪРҫРө Р·СҖРөРҪРёРө завиСҒРёСӮ РҫСӮ алгРҫСҖРёСӮРјРҫРІ СҖР°СҒРҝРҫР·РҪаваРҪРёСҸ РҫРұСҖазРҫРІ (Pattern Recognition) РҪР° РҫСҒРҪРҫРІРө РјР°СҲРёРҪРҪРҫРіРҫ РҫРұСғСҮРөРҪРёСҸ. РқР°СҒСӮРҫСҸСүРёР№ РҝСҖРҫСҖСӢРІ РІ РәРҫРјРҝСҢСҺСӮРөСҖРҪРҫРј Р·СҖРөРҪРёРё РІ РәРҫРҪСҶРө 1990-С… РіРі. РұСӢР» РІСӢР·РІР°РҪ РәР°Рә СҖаз РҝРҫСҸРІР»РөРҪРёРөРј РҪРҫРІСӢС… РјРҫСүРҪСӢС… алгРҫСҖРёСӮРјРҫРІ, СӮР°РәРёС… РәР°Рә СғСҒРёР»РөРҪРёРө СҒлаРұСӢС… РәлаСҒСҒифиРәР°СӮРҫСҖРҫРІ (Boosting), РјР°СҲРёРҪР° РҫРҝРҫСҖРҪСӢС… РІРөРәСӮРҫСҖРҫРІ (Support Vector Machine) Рё СҖР°РҪРҙРҫРјРёР·РёСҖРҫРІР°РҪРҪСӢР№ СҖРөСҲР°СҺСүРёР№ Р»РөСҒ (Random Forest). РқР° РҫСҒРҪРҫРІРө СғСҒРёР»РөРҪРёСҸ СҒлаРұРҫРіРҫ РәлаСҒСҒифиРәР°СӮРҫСҖР° РұСӢР» СҖазСҖР°РұРҫСӮР°РҪ РјРөСӮРҫРҙ РҝРҫРёСҒРәР° лиСҶ Violo-Jones, РҪазСӢРІР°РөРјСӢР№ РҝРҫ РёРјРөРҪам авСӮРҫСҖРҫРІ, СҸРІР»СҸСҺСүРёР№СҒСҸ РҙРө-фаРәСӮРҫ СҒСӮР°РҪРҙР°СҖСӮРҫРј, СҖРөСҲР°СҺСүРёР№ Р·Р°РҙР°СҮСғ РҪР°СҒСӮРҫР»СҢРәРҫ С…РҫСҖРҫСҲРҫ, СҮСӮРҫ РІСҒРө РҝРҫСҒР»РөРҙСғСҺСүРёРө РјРөСӮРҫРҙСӢ РҝСҖРөРІРҫСҒС…РҫРҙСҸСӮ РөРіРҫ лиСҲСҢ РҪРөР·РҪР°СҮРёСӮРөР»СҢРҪРҫ. РҹСҖРҫСҒСӮРҫСӮР° Рё СҚффРөРәСӮРёРІРҪРҫСҒСӮСҢ РҙР°РҪРҪРҫРіРҫ РјРөСӮРҫРҙР° РҝРҫР·РІРҫлили РІСҒСӮСҖаиваСӮСҢ РөРіРҫ РҙажРө РІ РұСӢСӮРҫРІСӢРө С„РҫСӮРҫРәамРөСҖСӢ Рё СҒРҫСӮРҫРІСӢРө СӮРөР»РөС„РҫРҪСӢ. РҹСҖРёСҮРөРј РҫСӮ РҫРҝСғРұлиРәРҫРІР°РҪРёСҸ РјРөСӮРҫРҙР° РҙРҫ РҝРҫСҸРІР»РөРҪРёСҸ РөРіРҫ РІ СҖРөалСҢРҪСӢС… РәРҫРјРјРөСҖСҮРөСҒРәРёС… РҝСҖРҫРҙСғРәСӮах РҝСҖРҫСҲР»Рҫ РІСҒРөРіРҫ РҪРөСҒРәРҫР»СҢРәРҫ Р»РөСӮ. Р—Р°РҙР°СҮРё СҖР°СҒРҝРҫР·РҪаваРҪРёСҸ РҝРҫРІРөРҙРөРҪРёСҸ Р»СҺРҙРөР№, РҫСҒРҫРұРөРҪРҪРҫ РІ РұРҫР»СҢСҲРҫР№ РіСҖСғРҝРҝРө, РҙРөСӮРөРәСӮРёСҖРҫРІР°РҪРёСҸ РҝРөСҖРөРҪРҫСҒРёРјСӢС… РҝСҖРөРҙРјРөСӮРҫРІ Рё СӮ.Рҙ. РҫРәазалиСҒСҢ СҒР»РҫР¶РҪРөРө РІ РІРёРҙСғ РұРҫР»СҢСҲРөР№ РІРҪСғСӮСҖРёРәлаСҒСҒРҫРІРҫР№ РёР·РјРөРҪСҮРёРІРҫСҒСӮРё РҝРҫ СҒСҖавРҪРөРҪРёСҺ СҒ лиСҶами. РқРҫ РҪРҫРІСӢРө алгРҫСҖРёСӮРјСӢ СӮРҫР¶Рө РҝРҫСҸРІР»СҸСҺСӮСҒСҸ РҫСҮРөРҪСҢ РұСӢСҒСӮСҖРҫ РұлагРҫРҙР°СҖСҸ РҝСҖРҫРіСҖРөСҒСҒСғ РІ СҖазвиСӮРёРё РіСҖафиСҮРөСҒРәРёС… РјРҫРҙРөР»РөР№ Р°РҪализа РҫРұСҖазРҫРІ, СӮР°РәРёС… РәР°Рә РјР°СҖРәРҫРІСҒРәРёРө СҒР»СғСҮайРҪСӢРө РҝРҫР»СҸ (Markov Random Field) Рё РұСӢСҒСӮСҖСӢРө алгРҫСҖРёСӮРјСӢ СҖРөСҲРөРҪРёСҸ Р·Р°РҙР°СҮ РҪР° РҪРёС… (РҪР°РҝСҖРёРјРөСҖ, РҪР° РҫСҒРҪРҫРІРө СҖазСҖРөР·РҫРІ РіСҖафРҫРІ).
РһРҝСғРұлиРәРҫРІР°РҪРҫ: Р–СғСҖРҪал "РЎРёСҒСӮРөРјСӢ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё" #1, 2010
РҹРҫСҒРөСүРөРҪРёР№: 11676
РҗРІСӮРҫСҖ
| |||
Р’ СҖСғРұСҖРёРәСғ "Р’РёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёРө (CCTV)" | Рҡ СҒРҝРёСҒРәСғ СҖСғРұСҖРёРә | Рҡ СҒРҝРёСҒРәСғ авСӮРҫСҖРҫРІ | Рҡ СҒРҝРёСҒРәСғ РҝСғРұлиРәР°СҶРёР№


